PROFIsafe
| Erweiterte Optionen |
Eine Statusmeldung, die an die Sicherheits-SPS gesendet wird, enthält die Informationen in der folgenden Tabelle.
|
| Erweiterte Optionen |
|
| Erweiterte Optionen |
|
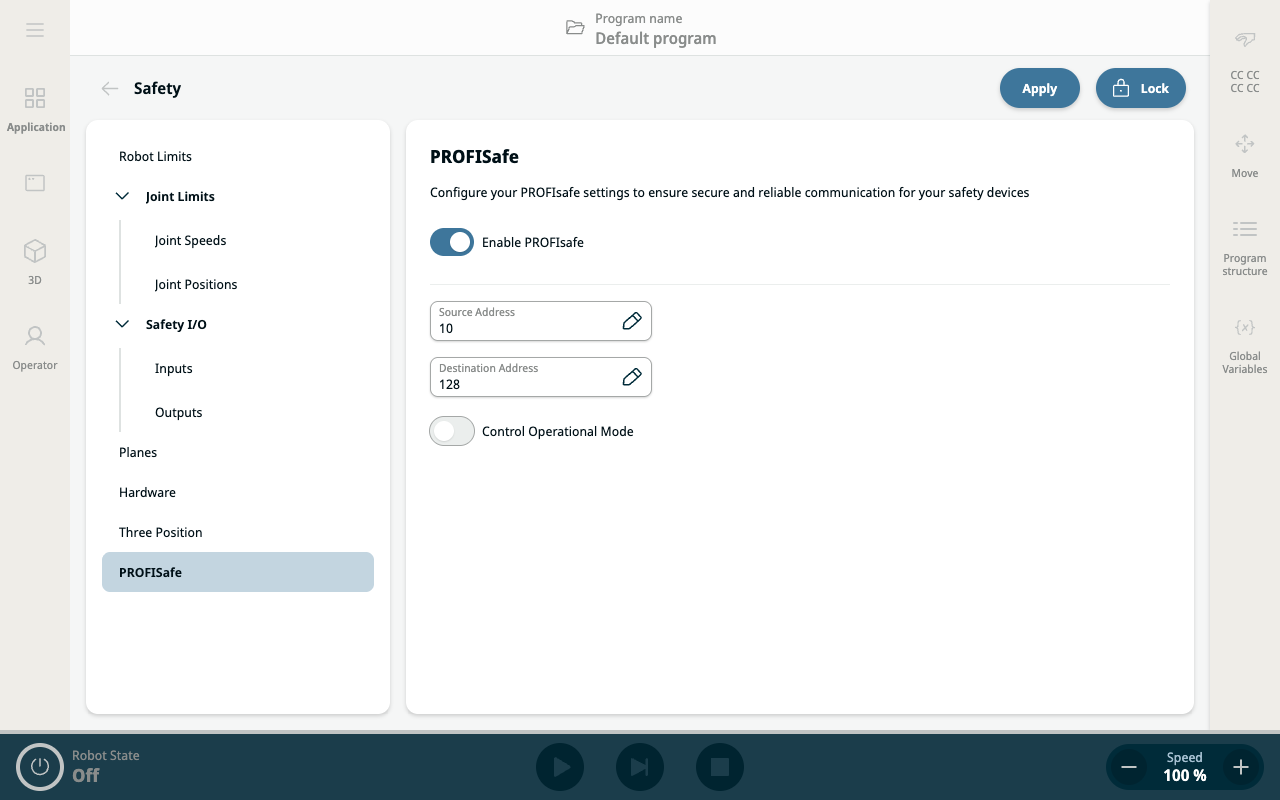
| PROFIsafe konfigurieren |
|
|
|
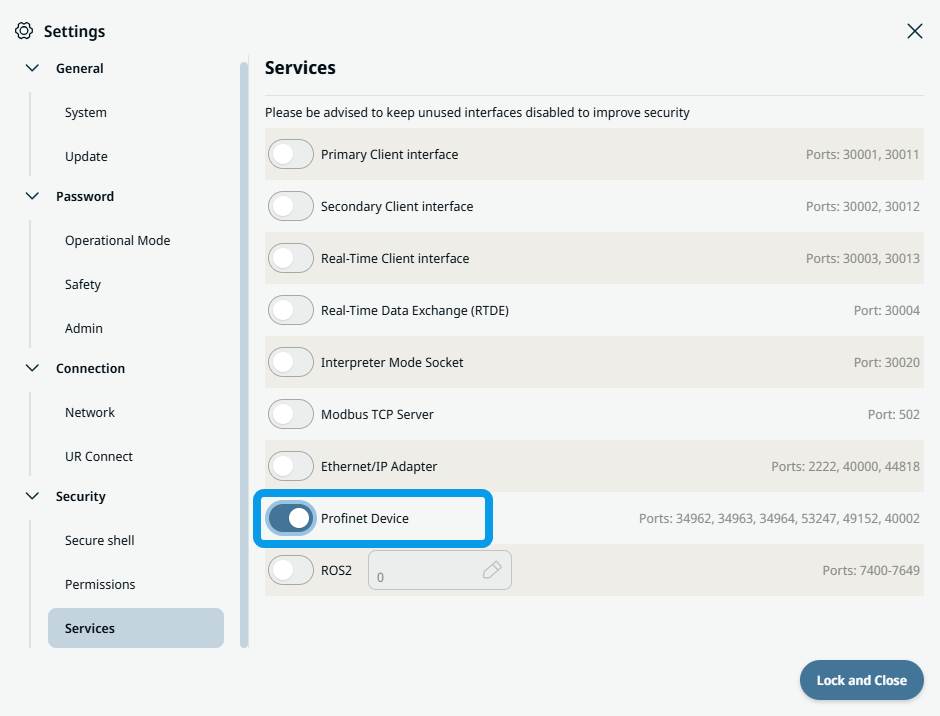
Um PROFIsafe zu konfigurieren und zu nutzen, muss Profinet-Gerät im Sicherheitsdienste-Einstellungsmenü aktiviert sein.
 Lesen Sie für Details und Schnittstellenposition Profinet.
|