Palletering
| Beskrivelse |
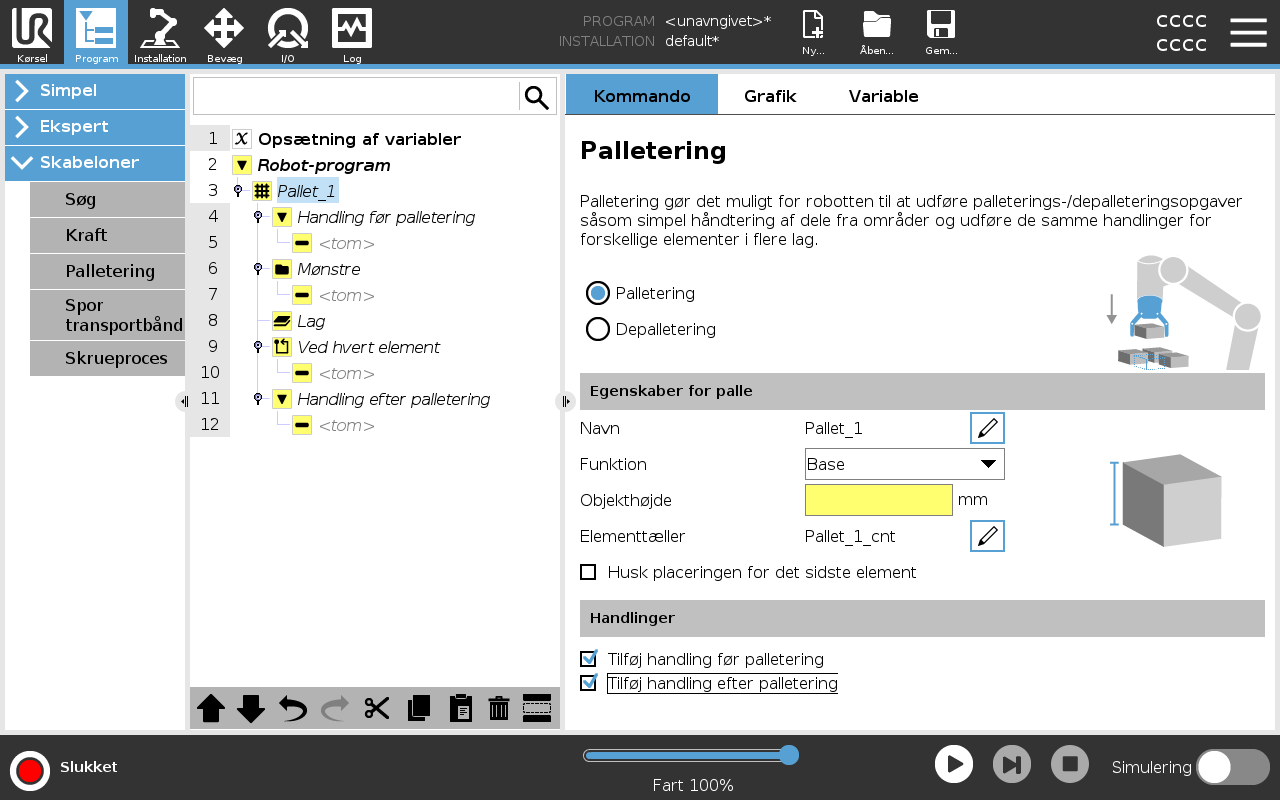
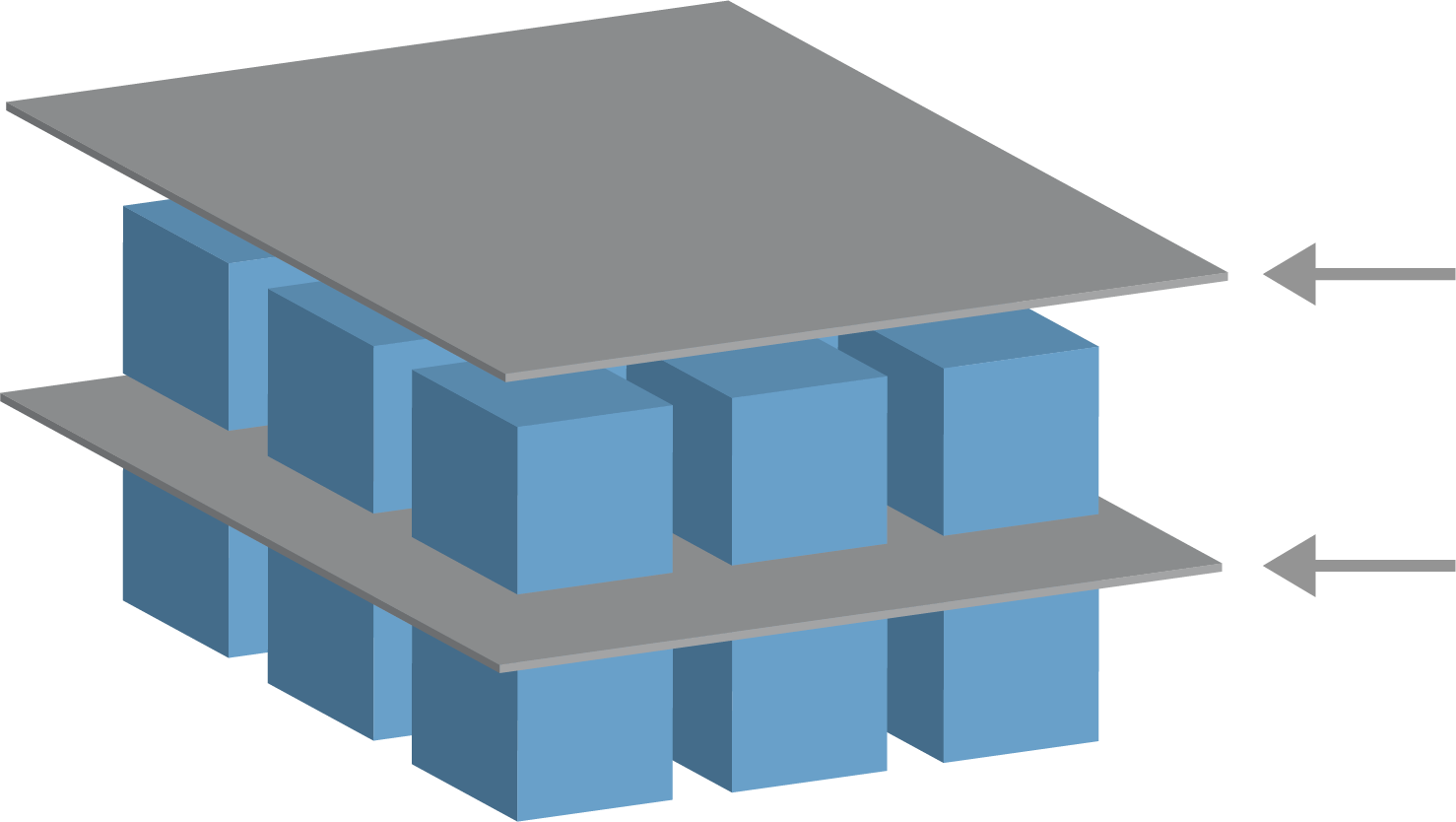
Palletering er en skabelon til nem programmering af palleterings- og afpalleteringsopgaver, opsamling og placering af (f.eks. fra bakker, fiksturer osv.), og til at få robotten til at udføre repeterbare handlinger for forskellige emner i flere lag med forskellige mønstre. Du kan oprette forskellige mønstre og anvende dem på bestemte lag. Du kan også placere en separator mellem hvert lag (se ). Desuden kan du bruge funktioner fra Palleegenskaber til nemt at justere placeringen af din palle. Du kan få mere at vide om funktioner ved at se Følg afsnittet Oprettelse af et palleteringsprogram nedenfor for at bruge palleteringsskabelonen.
|
| Oprettelse af et palleteringsprogram |
|
| Oprettelse af et palleteringsprogram |
|
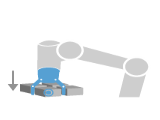
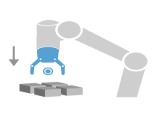
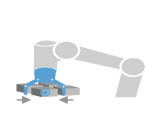
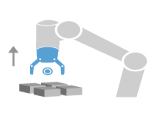
| Guiden Ved hvert emne |
Guiden Ved hvert emne hjælper med at definere de handlinger, der skal udføres ved hvert emne på en palle, herunder referencepunkt, tilgangs-viapunkt, viapunkt for værktøjshandlingspunkt og afslutnings-viapunkt (beskrevet i tabellen nedenfor). Tilgangs- og afslutnings-viapunkter for hver emne beholder samme orientering og retning uanset de forskellige emners orientering.
|
| Manuel konfiguration |
|
| (A) Guiden Separator |
|
| (B) Manuel konfiguration |
|
| Indstillinger for tilpasning af et palleteringsprogram |
Du kan tilpasse dit palleteringsprogram på følgende måder:
|
| Positioner |
|



| Handlinger |
|