Søg
| Beskrivelse |
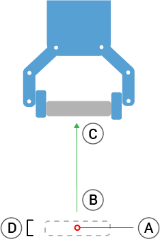
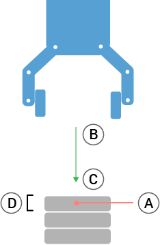
Søgefunktionen bruger en sensor til at fastslå den korrekte position til at gribe eller slippe et emne. Denne funktion gør det muligt at arbejde på stakke med emner af forskellig tykkelse, og bestemmelse af de nøjagtige positioner på elementer enten er ukendte eller for svære at programmere. Sensoren kan være en trykknap, en tryksensor eller en kapacitet sensor.
|
| Søg |
For at programmere en søgning, skal du definere følgende:
Du skal også definere betingelsen for, hvornår den næste stakposition nås, og en speciel programsekvens, der udføres ved hver stakposition. Hastighed og acceleration for den bevægelse, der benyttes til stablingen, skal angives.
|