Ledbevægelse
| Beskrivelse |
The Joint Move is a move command node that supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. Bevægelsen er måske ikke en direkte linje mellem A og B, men optimal for leddenes startposition og leddenes slutposition. Bevæg led udfører bevægelser, der beregnes i robotarmens ledrum. Led kontrolleres for at afslutte deres bevægelser på samme tid. Denne bevægelsestype resulterer i en kurvet bane, som værktøjet vil følge.
|
|
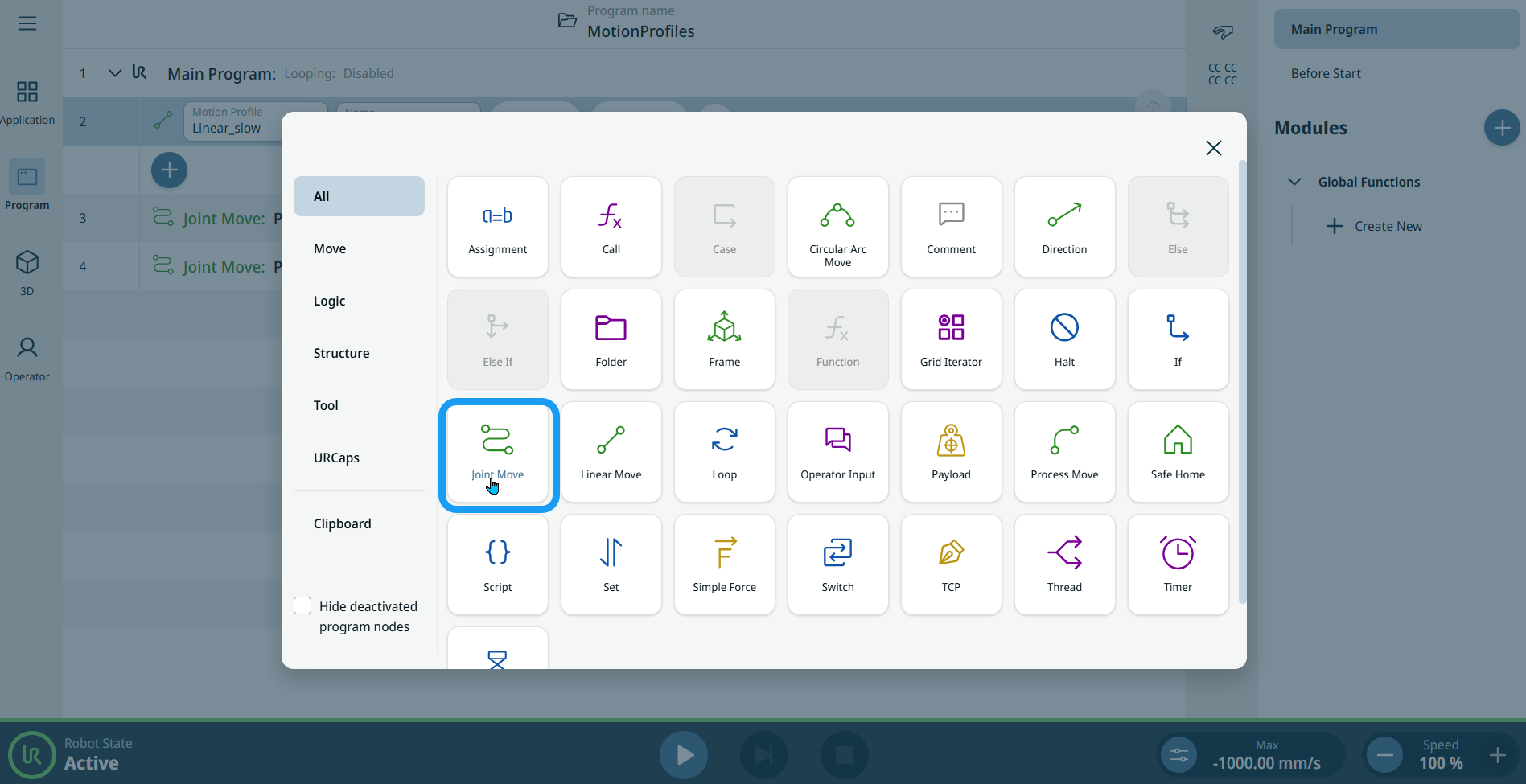
To access Joint Move command |
|
|
|
|
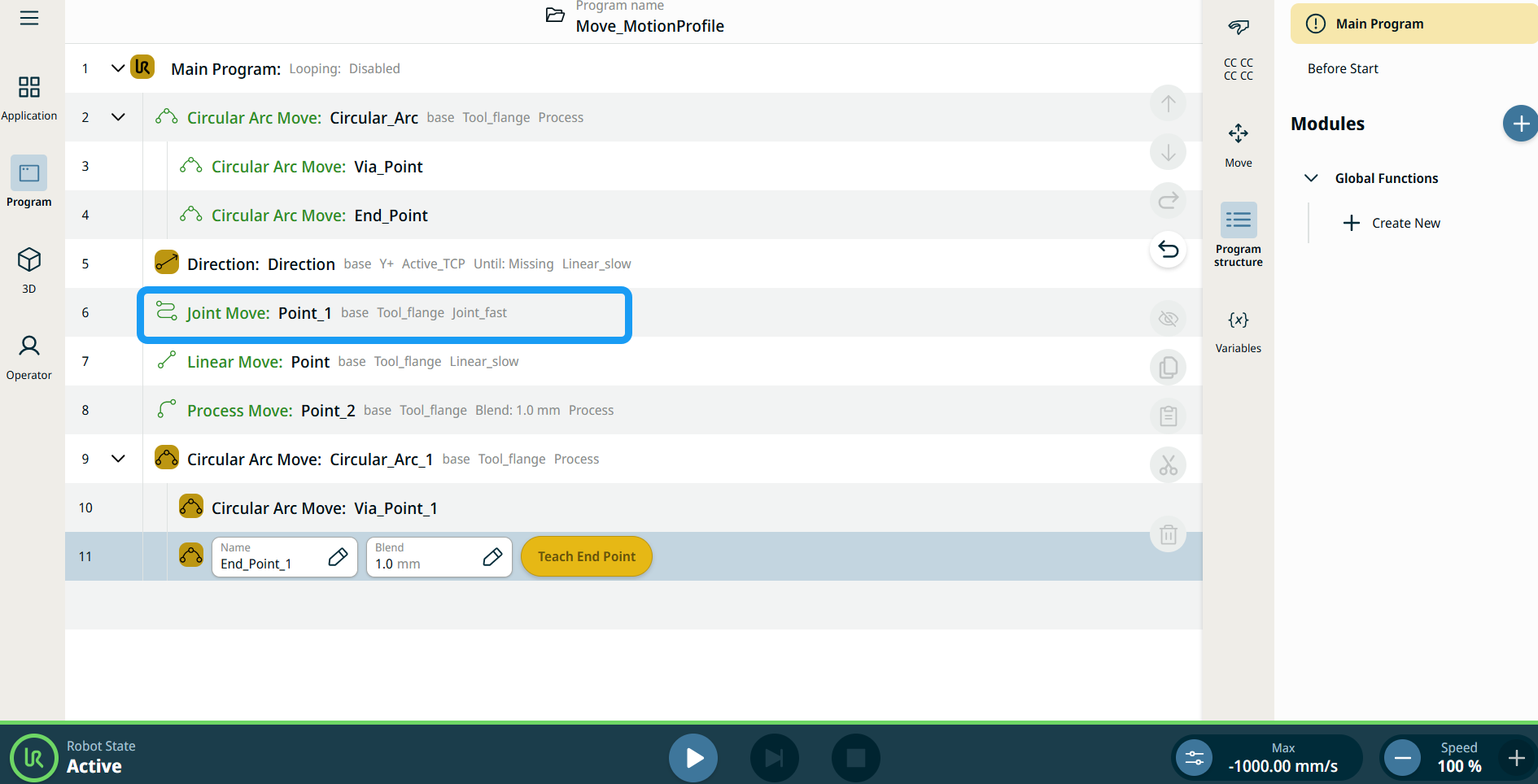
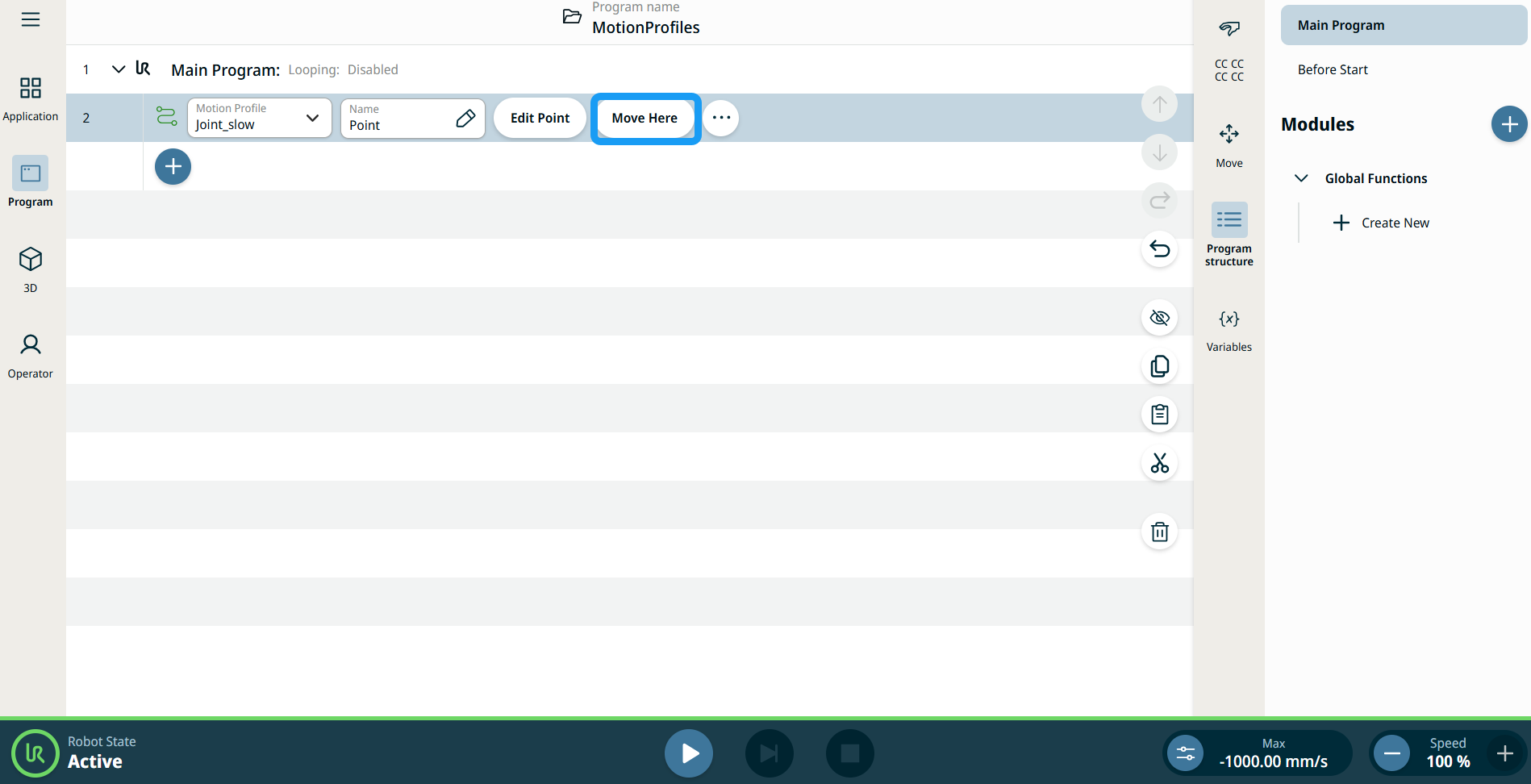
| Bevægelsesprofil-etiketter på Bevæg-knuder |
Alle Bevæg-relaterede kommandoknuder i programtræet viser den Bevægelsesprofil der er tilknyttet hver knude. Denne funktion giver brugerne mulighed for at se den valgte Bevægelsesprofil på en Bevæg-knude. Denne funktion implementeres på følgende kommando-knuder: Bevæg-knuder med brugerdefineret bevægelsesprofil vil vise værdierne for hastighed og acceleration i stedet for Bevægelsesprofil. |
|
|
|
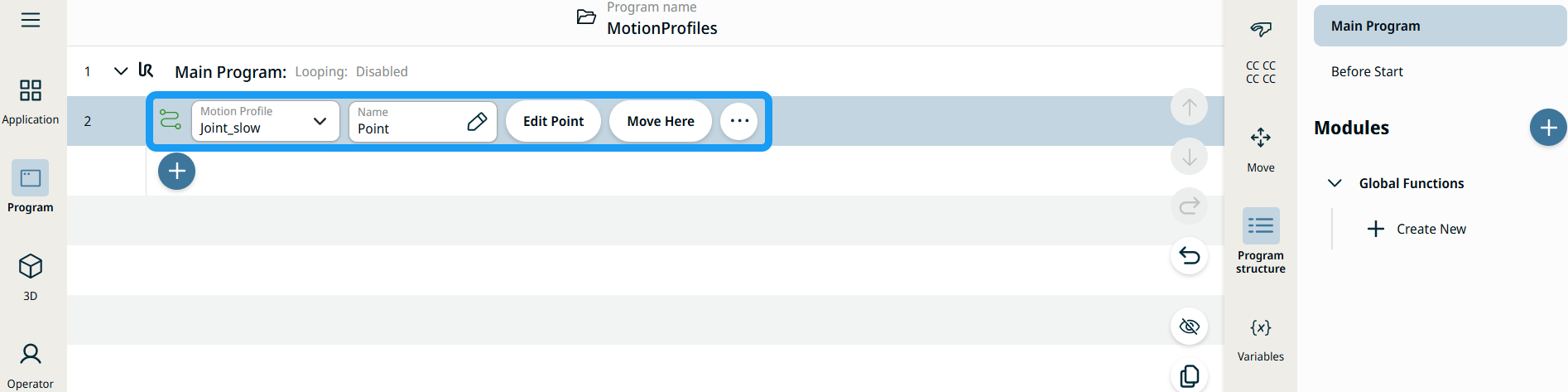
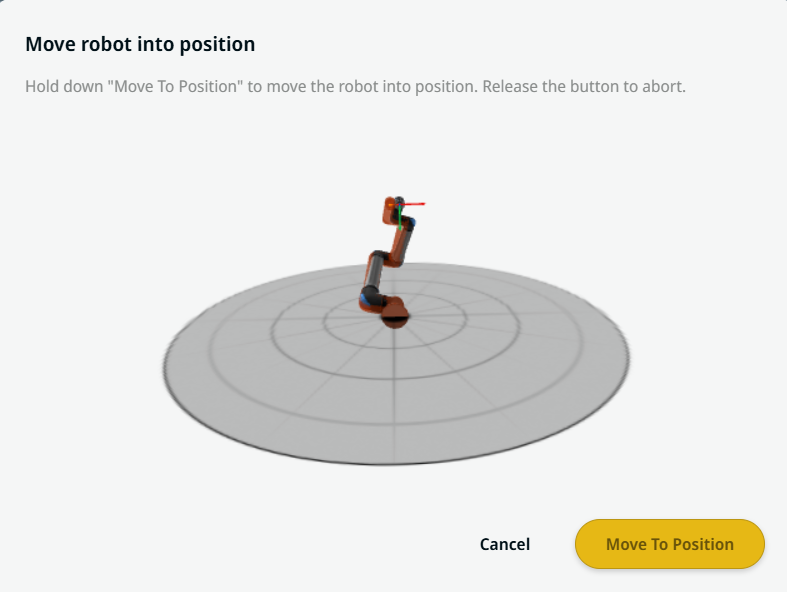
| Brug knappen Bevæg her |
Knappen Bevæg her ses i Lineær bevægelse og Ledbevægelse-kommandoer. Denne funktion giver dig mulighed for at flytte til positionen for et viapunkt direkte fra programtræet. Tryk på knappen Bevæg her åbner dialogen Bevæg robot i position. Knappen er synlig når viapunktet er blevet indlært og er kun aktiveret, når robottens status er i Normal eller Reduceret tilstand.
|
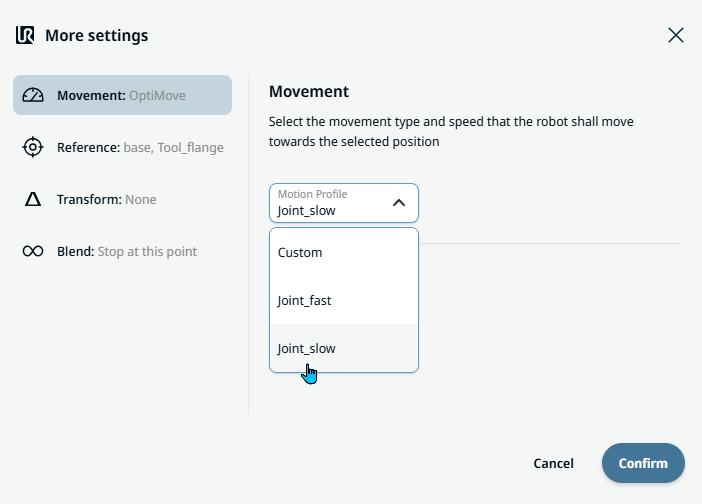
| Movement setting |
|
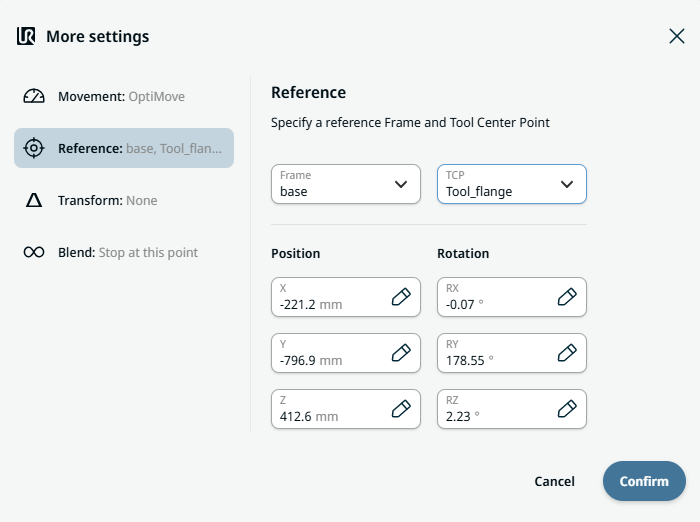
| Reference setting |
|
| Transform setting |
|
|
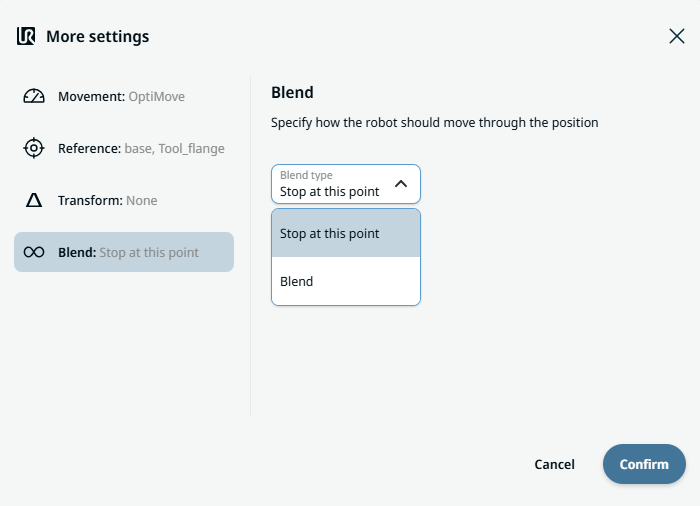
Blend setting |
|