Robotgrænser
| Beskrivelse |
Robotgrænser begrænser de generelle robotbevægelser.
Sikkerhedsgrænserne begrænser kræfter og bevægelser ved værktøjsflange og centrum for de to brugerdefinerede værktøjspositioner
|
| Hastighedsgrænser | 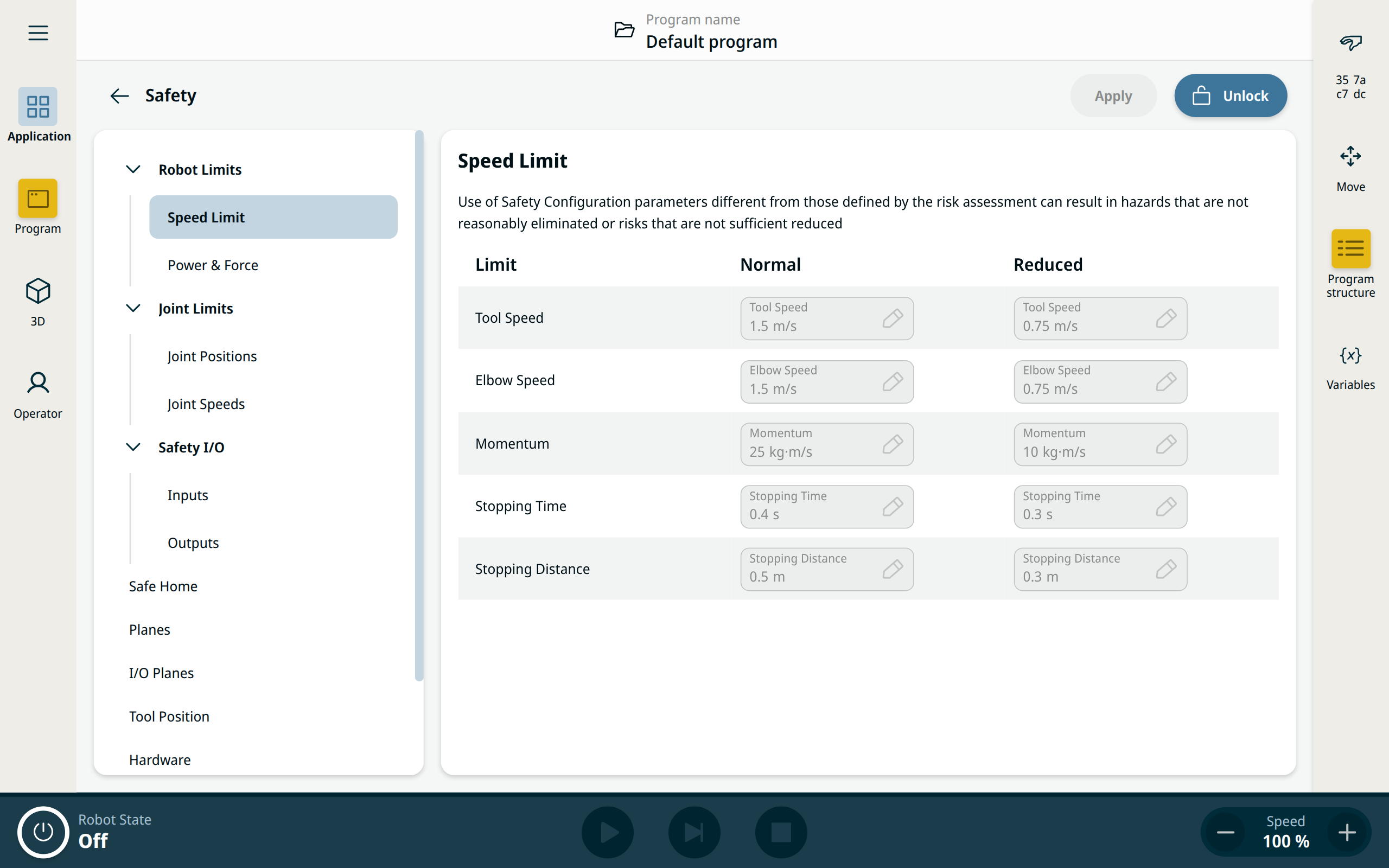
Begrænsning af stoppetid og afstand påvirker den samlede robothastighed. For eksempel, hvis stoppetiden er indstillet til 300 ms, er den maksimale robothastighed begrænset, så robotten kan stoppe inden for 300 ms.
|
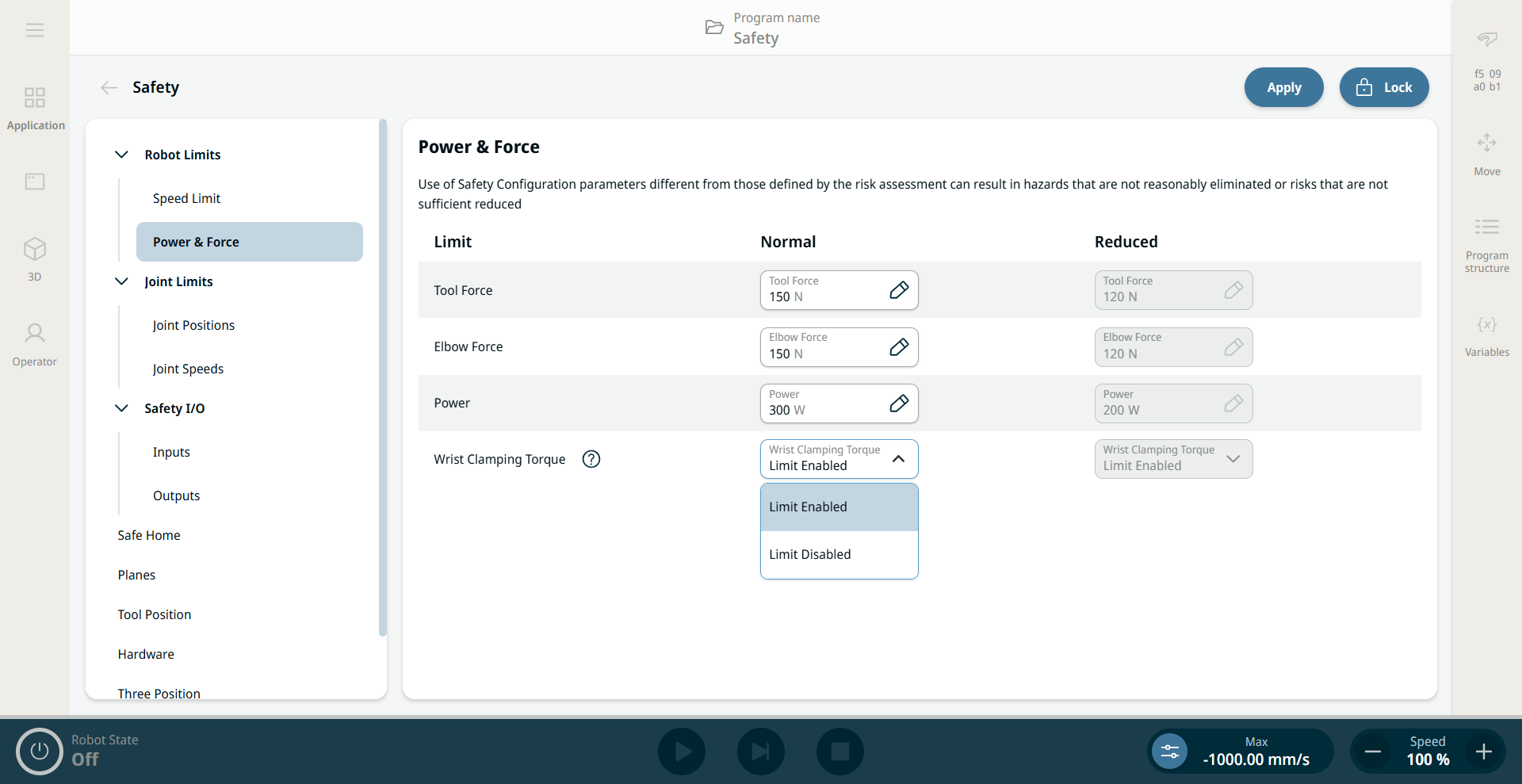
| Effekt og kraft |
Kraften for værktøjet og albuen kan overskrides af de tre håndled, hvis sikkerhedsfunktionen "håndled klemme-moment" er deaktiveret
|