Lifting and Handling
| Description |
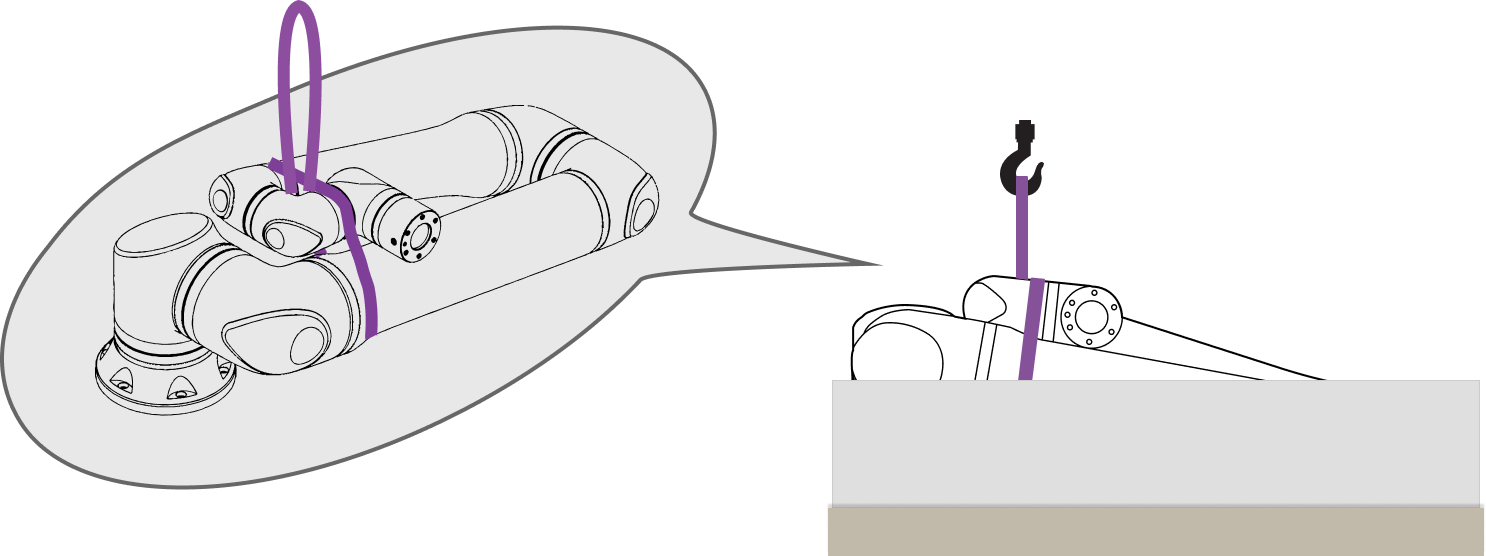
The robot arms come in different sizes and weights, so it is important to use the appropriate lifting and handling techniques for each model. Here you can find information on how to safely lift and handle the robot.
|
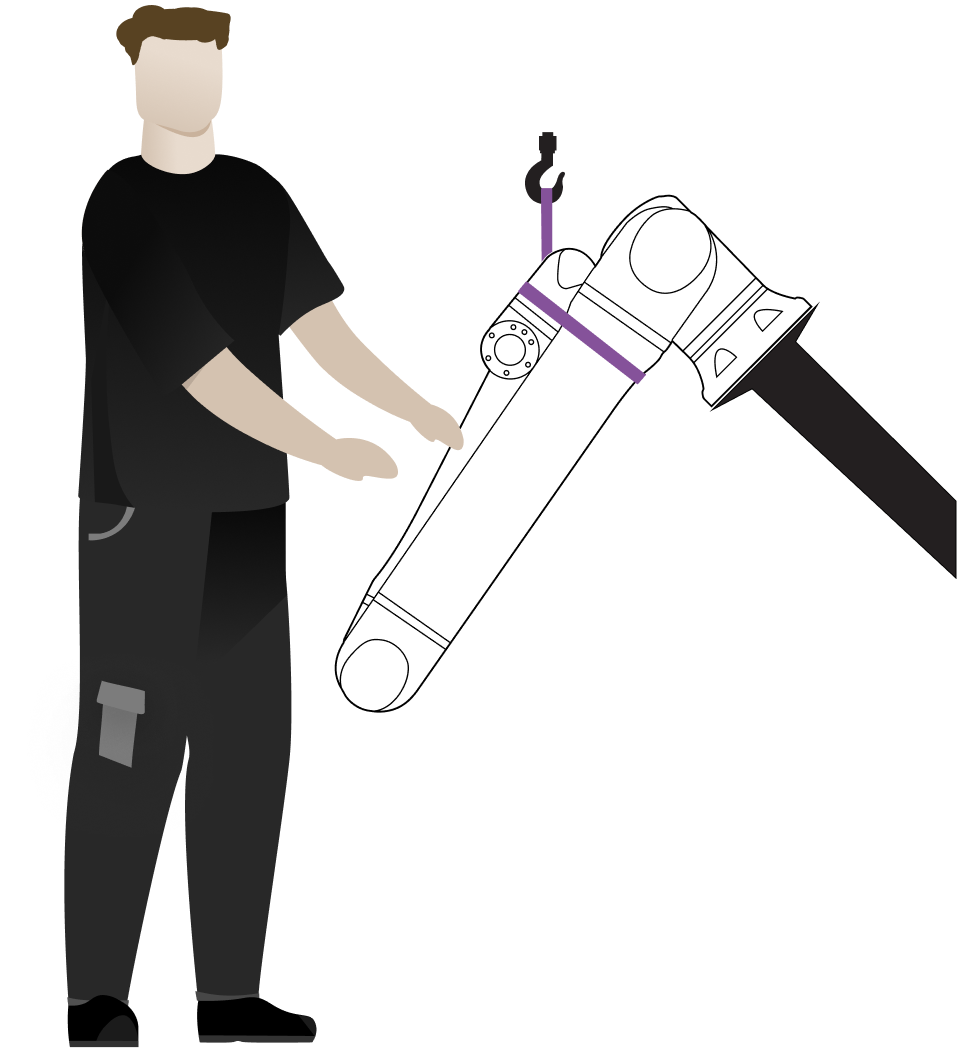
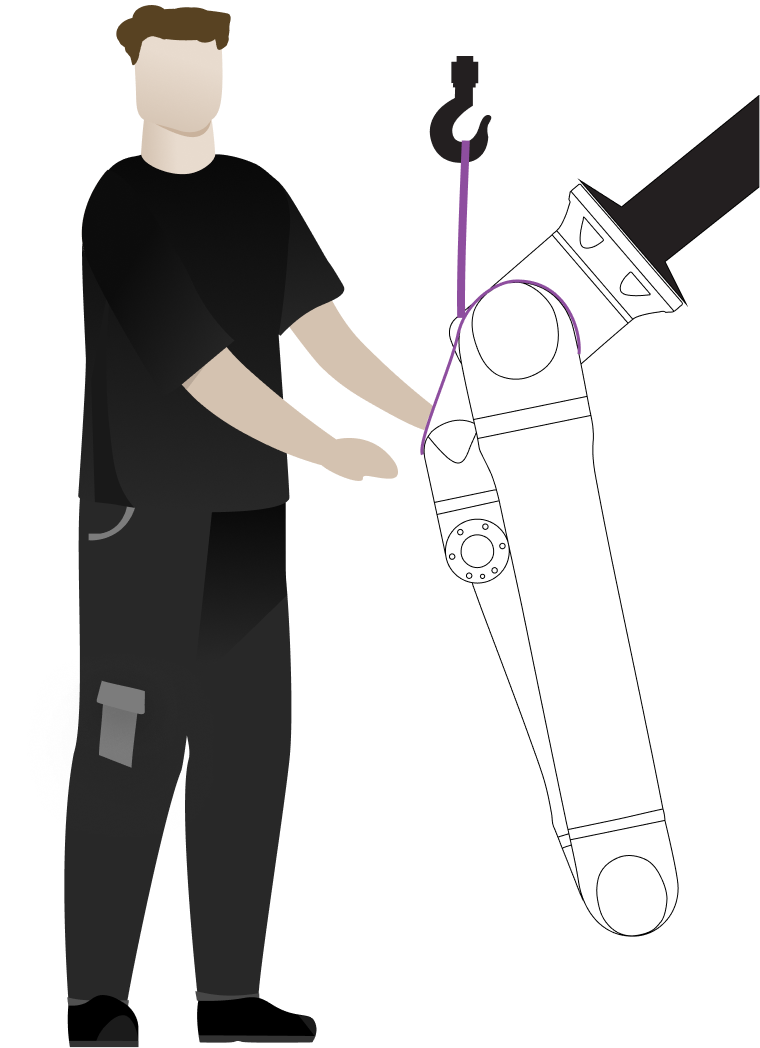
| Proper lifting and handling |
|
|
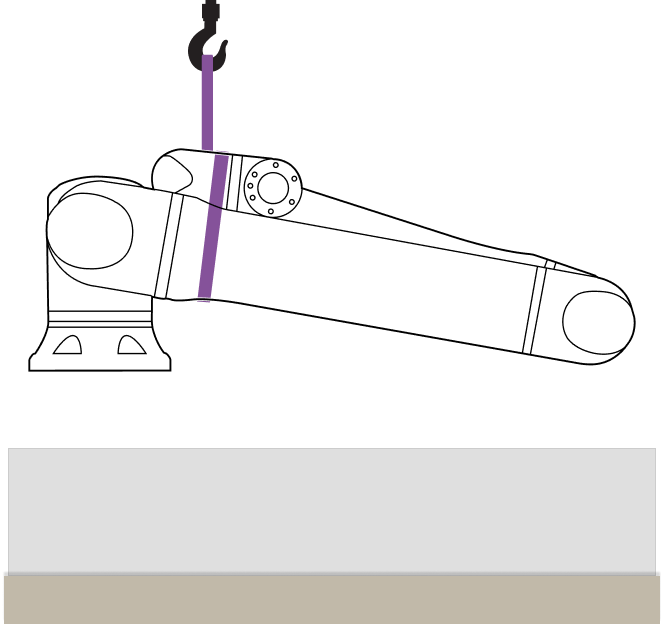
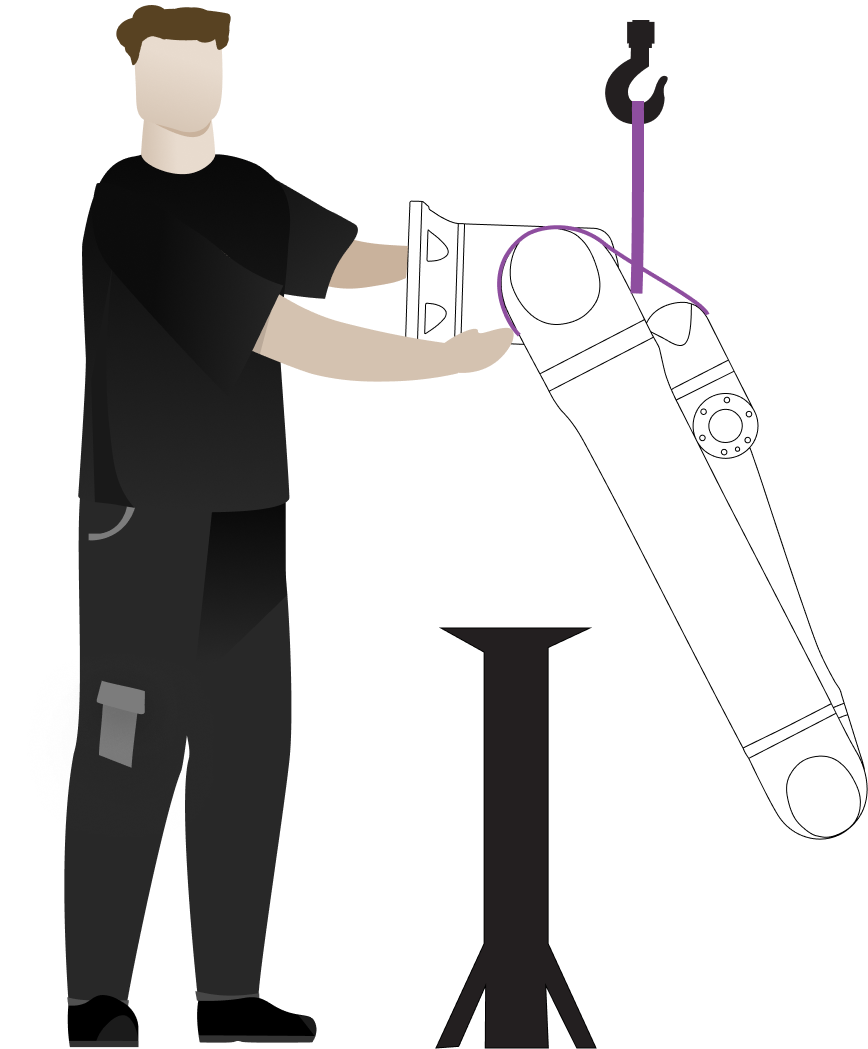
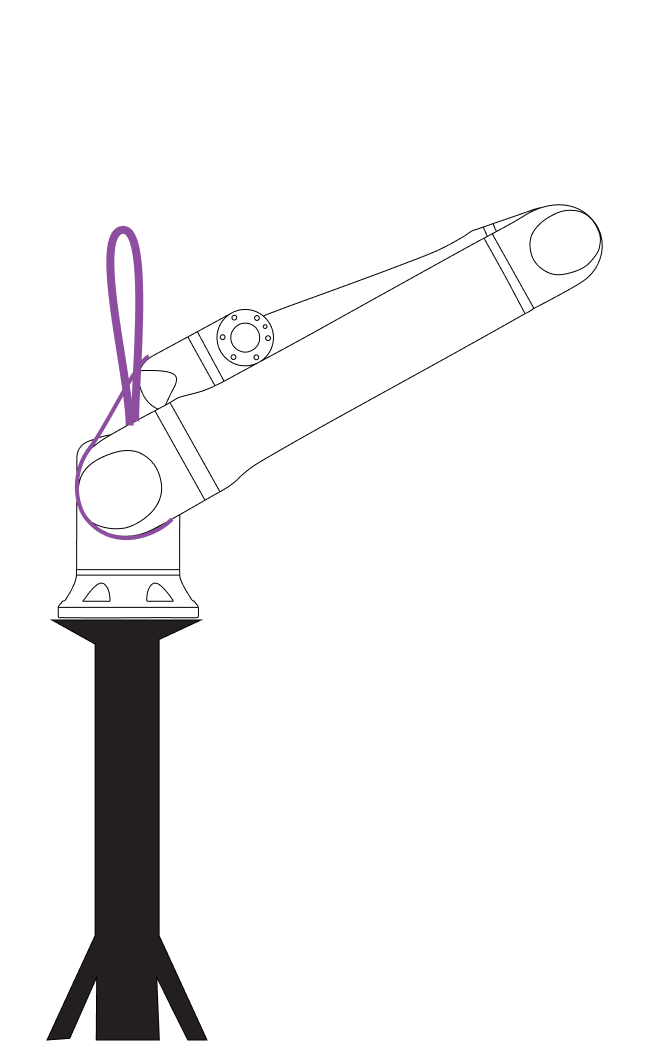
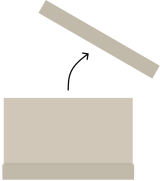
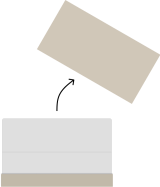
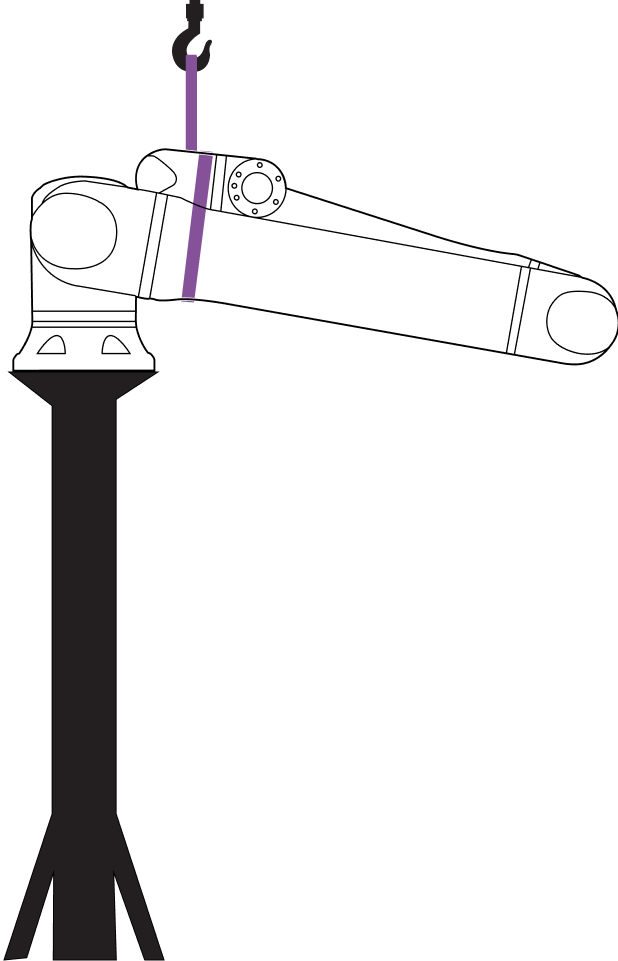
| Mounting the Robot Arm |
The robot arm can be mounted sideways, upside-down or in an angle (±45°).
|
|