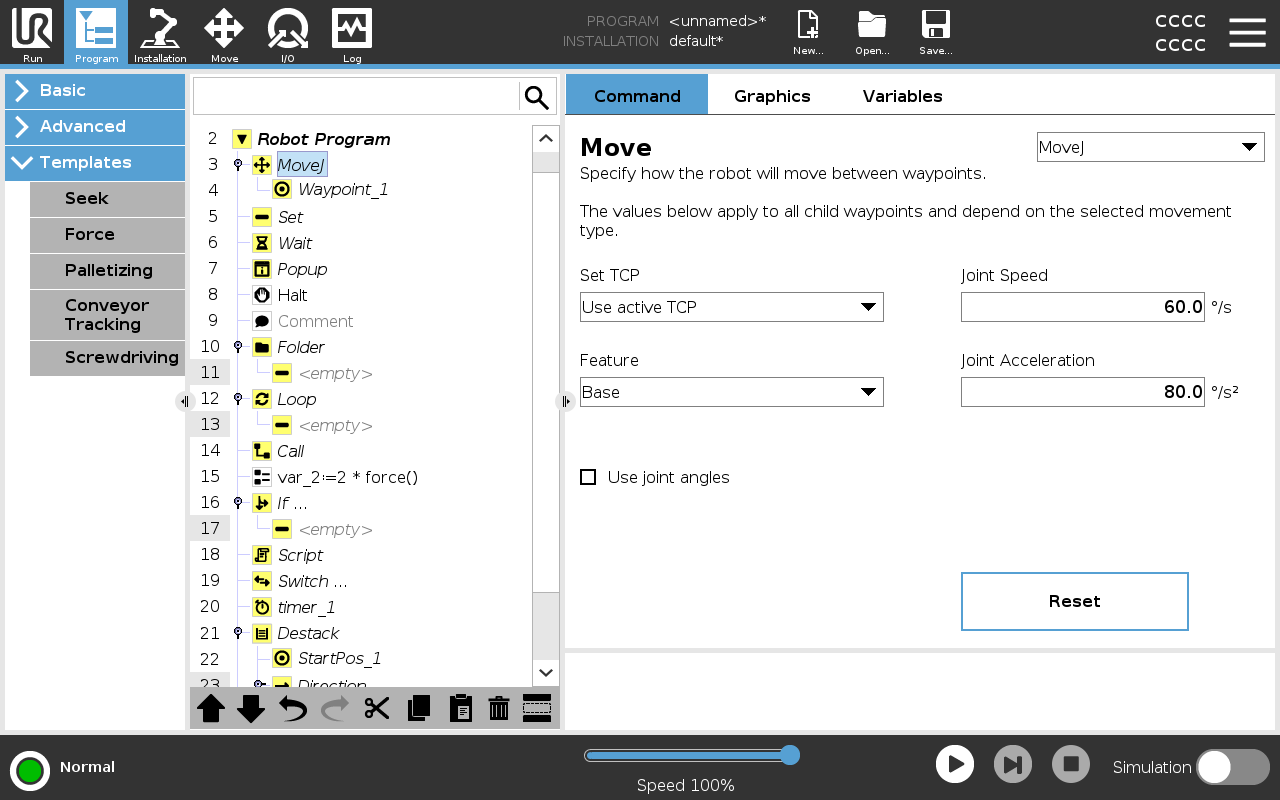
Move pane
| Description |
The different feature options in the Move pane allow you to add detail to a Move and the attached waypoint/s. Use these options to customize your program
See the Move pane features below:
|
|
Use this setting, if you need to change TCP during the robot program execution. This is useful if you need to manipulate different objects in the robot program. The way the robot moves is adjusted depending on which TCP is set as an active TCP. Ignore Active TCP allows this movement to be adjusted in relation to the Tool Flange. |
|
| Set the TCP in a Move |
To set the TCP in a Move
|
|
Feature is an option in the Move pane. Use Feature between waypoints for the program to remember the tool coordinates. This is useful when you are setting the waypoints (see Features).
See the different Features below. |
|
|
You can use Feature in the following circumstances:
|
|
You can use the Use joint angles as an alternative to the 3D pose when you are using MoveJ to define a waypoint.
Waypoints defined using the Use joint angle are not changed when a program is moved between robots. This is useful if you are installing your program in a new robot.
Using Use joint angles makes the TCP option unavailable. |