Set
| Description |
The Set command is one of the most often used commands. The Set command can turn external devices on and off. The Set command can also increase or decrease current/voltage to external devices. You can always test your setup by using the test button in the right lower corner of the screen. See the following sections about using Set: The robot uses different Set commands. See the Set command types below.
|
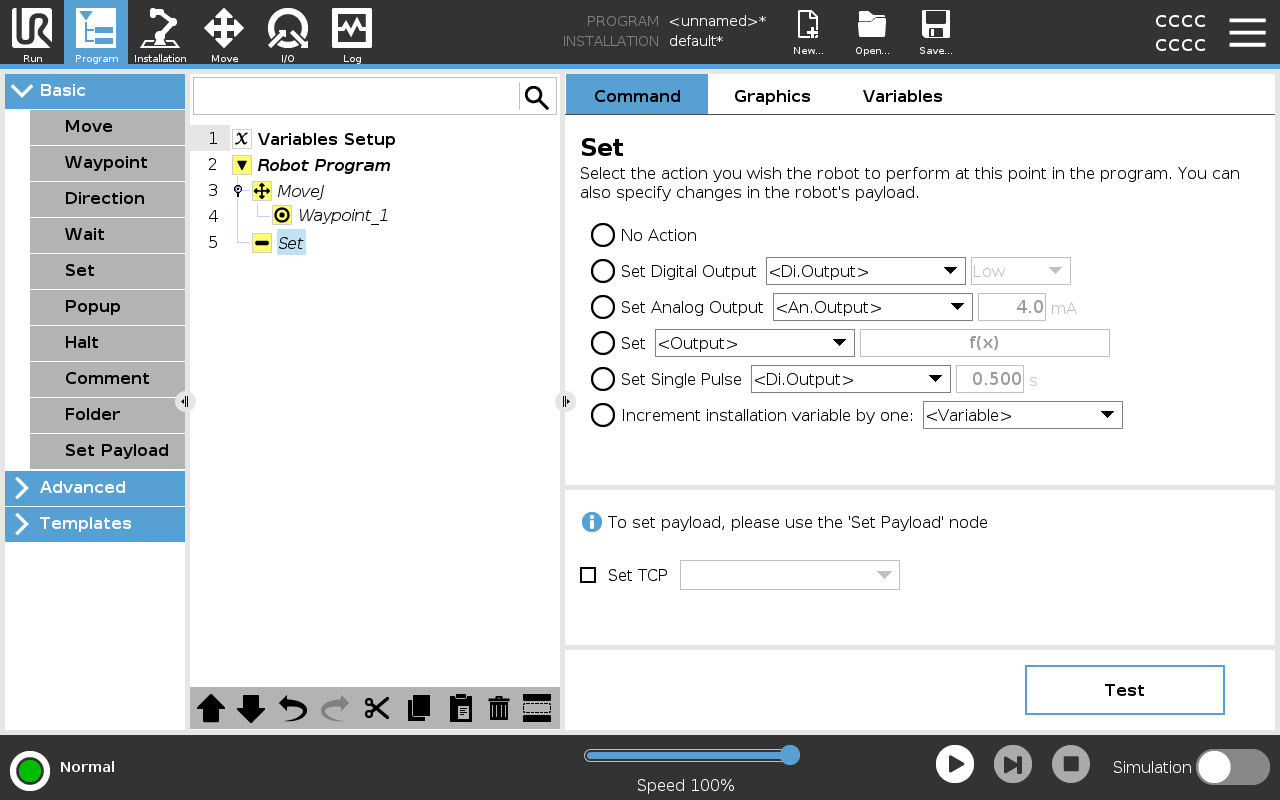
| Set digital output |
The digital output should be planned as a start/stop or on/off action. |
|
|
|
| Example: Set digital output |
Use this Set command, if you want a conveyor to start or stop moving.
|