Constrained Freedrive
| Description |
Constrained Freedrive mode allows a robot to move freely while being compliant in specific axes. This mode is useful for manually guiding the robot without following a trajectory, but it requires careful management to avoid unintended movements or protective stops due to high acceleration and deceleration. When the robot arm is in Freedrive, a panel appears in PolyScope X. |
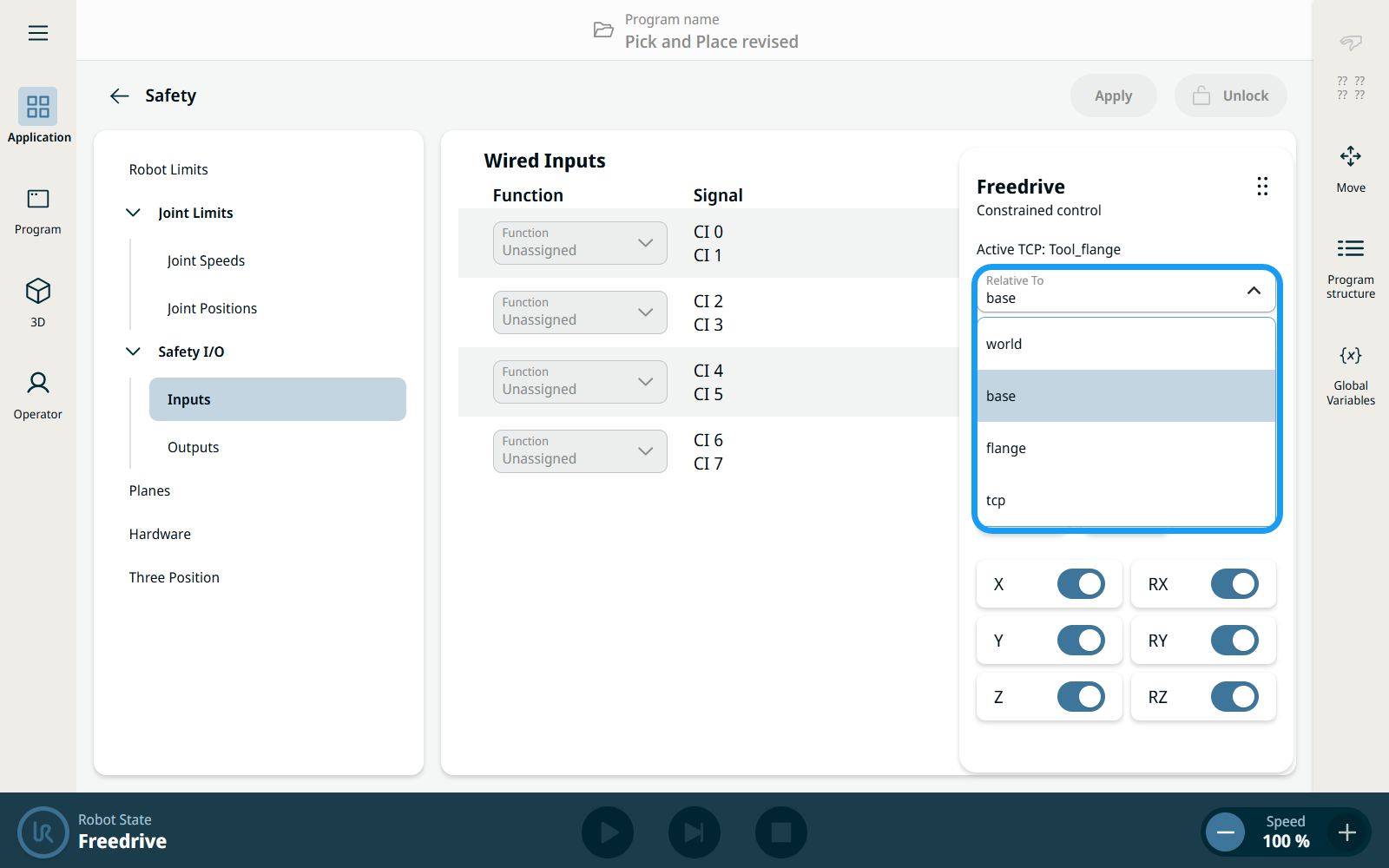
| To access the Freedrive Panel |
|
|
|
|
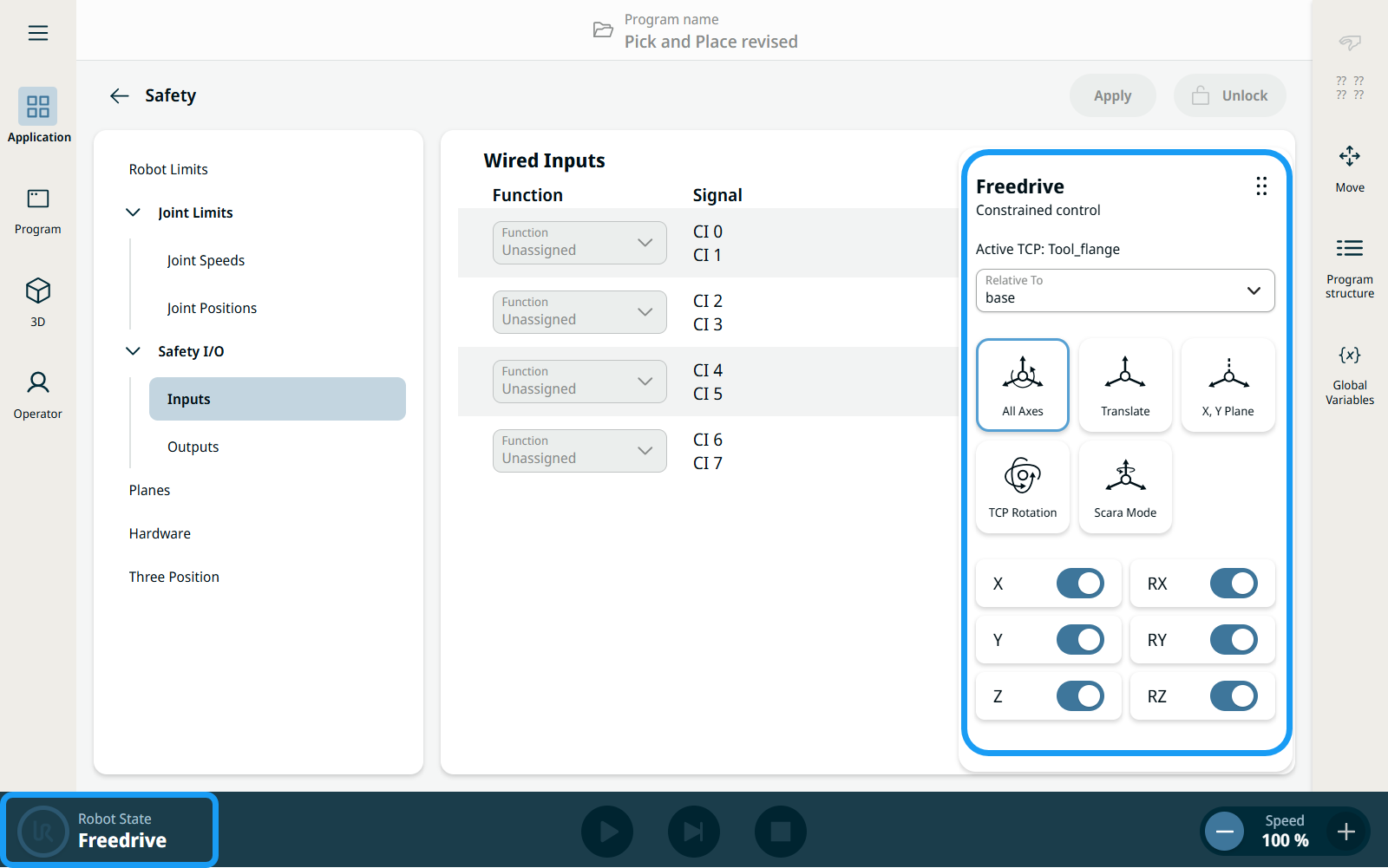
| Freedrive Panel icons |
You can lock one or more of the axes allowing the TCP to move in a particular direction, as defined in the table below. |
||||||||||
|
|
|
||||||||||
|
|
Moving the robot arm in some axes when a tool is attached, can present a pinch point.
|

|
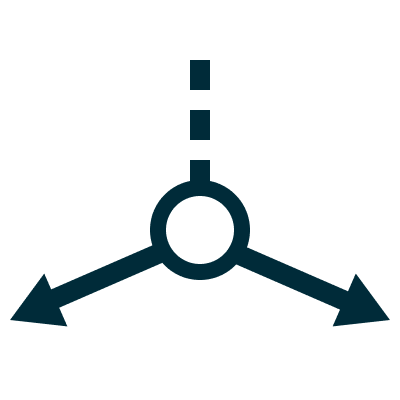
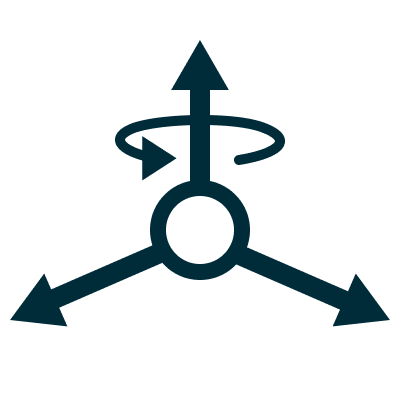
Five Constrained Freedrive presets |
There are five presets that the user can use to constrain movement while in freedrive. Tap the preset icon for your preferred Freedrive constrained movement. Alternatively, users can toggle the sliders for X, Y, Z and RX, RY, RZ to lock or unlock any combination of axes or rotations. When no preset is matched, the preset icon will not be shown as active.
|
 All Axes
All Axes X, Y Plane
X, Y Plane TCP Rotation
TCP Rotation Scara Mode
Scara Mode