Joint Verification PolyScope X
|
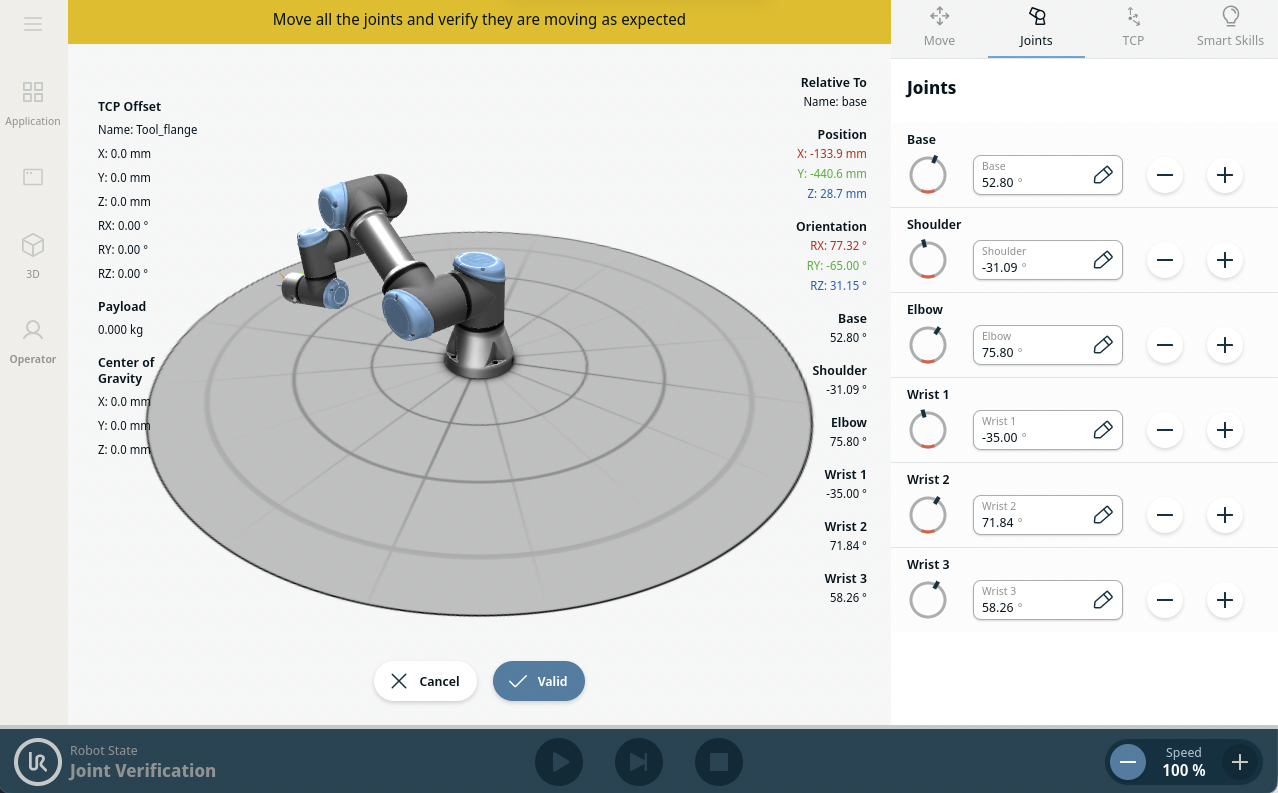
Verification steps |
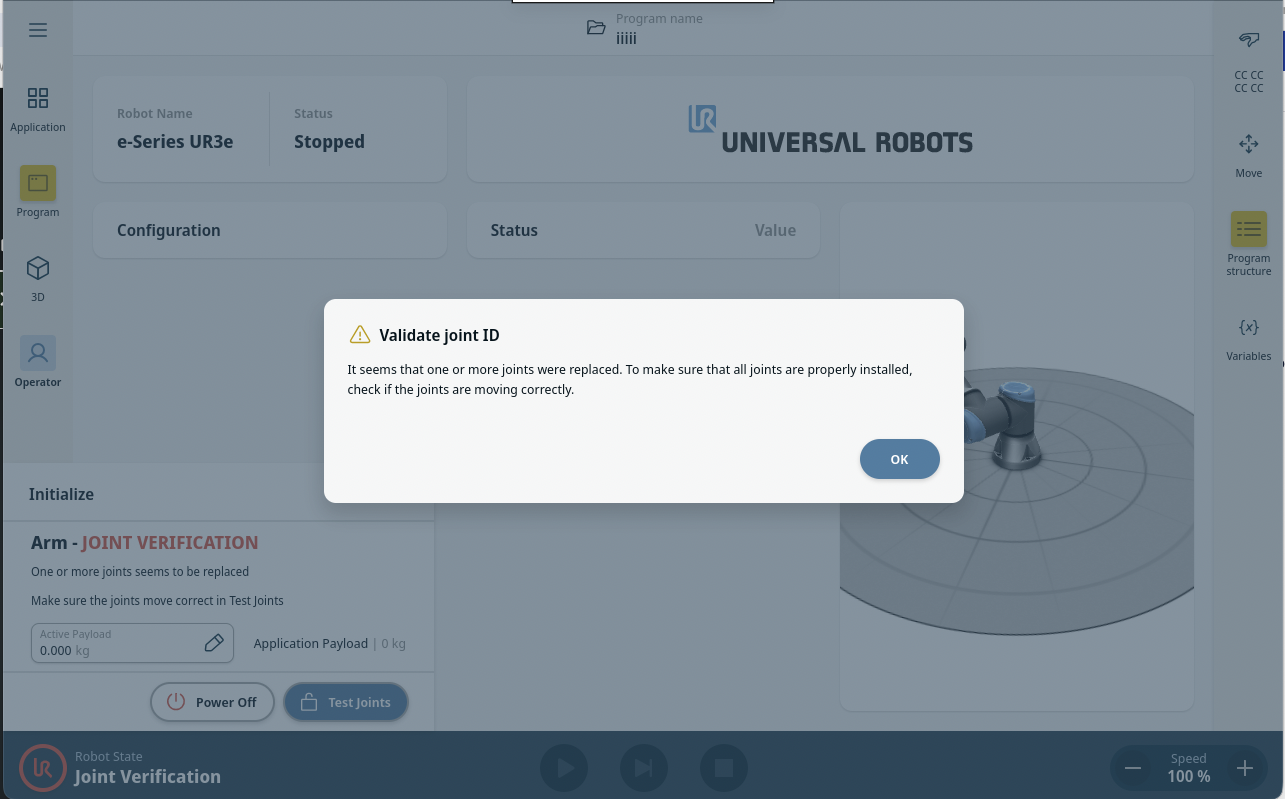
After replacing any joint on a robot, the controller requires a Joint Verification process. This procedure ensures that each joint is correctly identified in the system. The process now appears automatically during the first power on after a joint replacement.
|
|