Skip To Main Content
Account
Settings
Logout
placeholder
Account
Settings
Logout
Filter:
All Files
Submit Search
PolyScope X Software Handbook
Robot User Manuals
UR3e
UR5e
UR7e
UR10e
UR12e
UR16e
UR8 Long
Preface
Liability and Intended Use
Your Robot
Safety
Lifting and Handling
Assembly and Mounting
First Boot
Installation
End Effector Integration
Configuration
Settings
Safety Related Functions and Interfaces
Safety Configuration
Setting a Safety Password
Safety Menu Settings
Robot Limits
Joint Limits
Safety Planes
Tool Position Restriction
Cybersecurity Threat Assessment
Communication Networks
Risk Assessment
Emergency Events
Transportation
Maintenance and Repair
Disposal and Environment
Declarations and Certifications
Safety Functions Table
UR15
UR18
UR20
UR30
Script Directory
How to service your robot
Components for Robots
Kits For Your Robot
Software Guides
Download PDFs
Filter:
All Files
Submit Search
You are here:
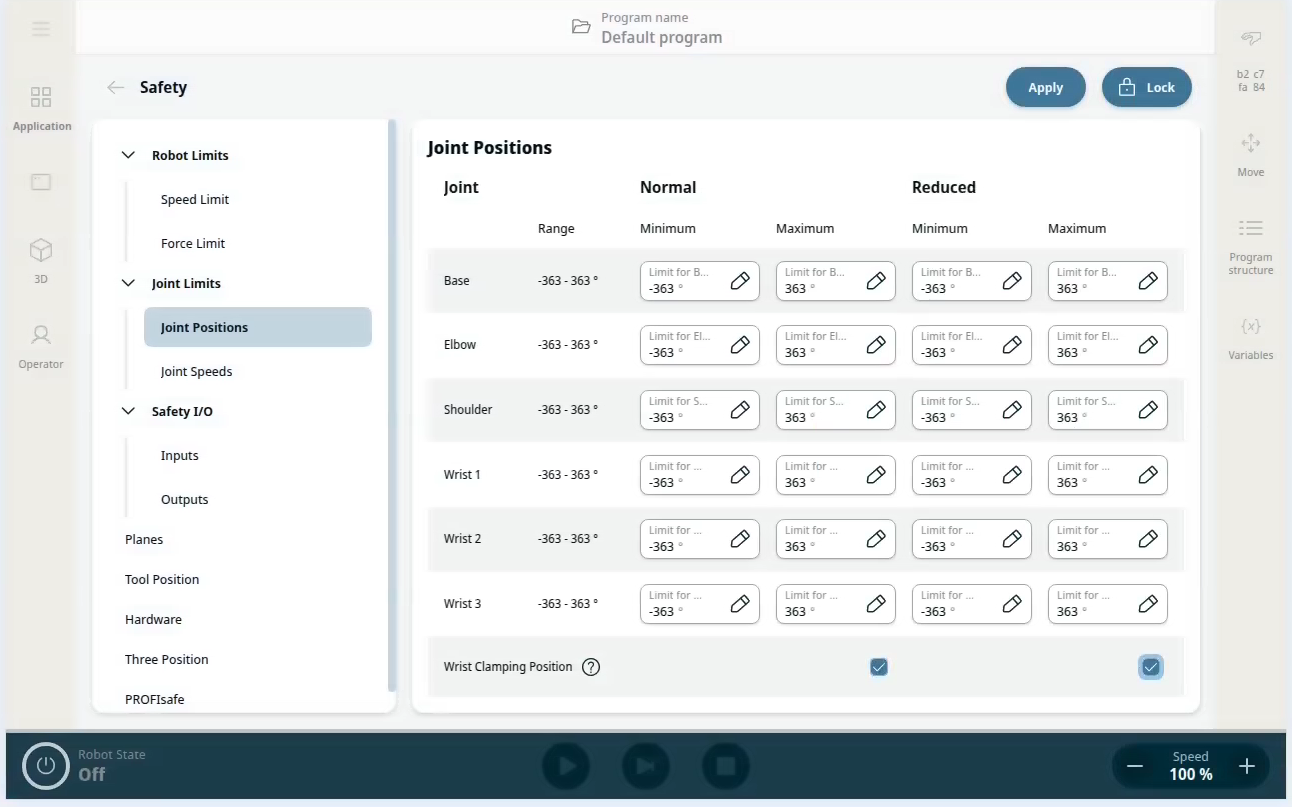
Joint Limits
Joint Positions
Position
Description
Wrist Clamping Positions
Avoids hand/finger clamping between the tool flange and the lower arm.
Enabled by default.
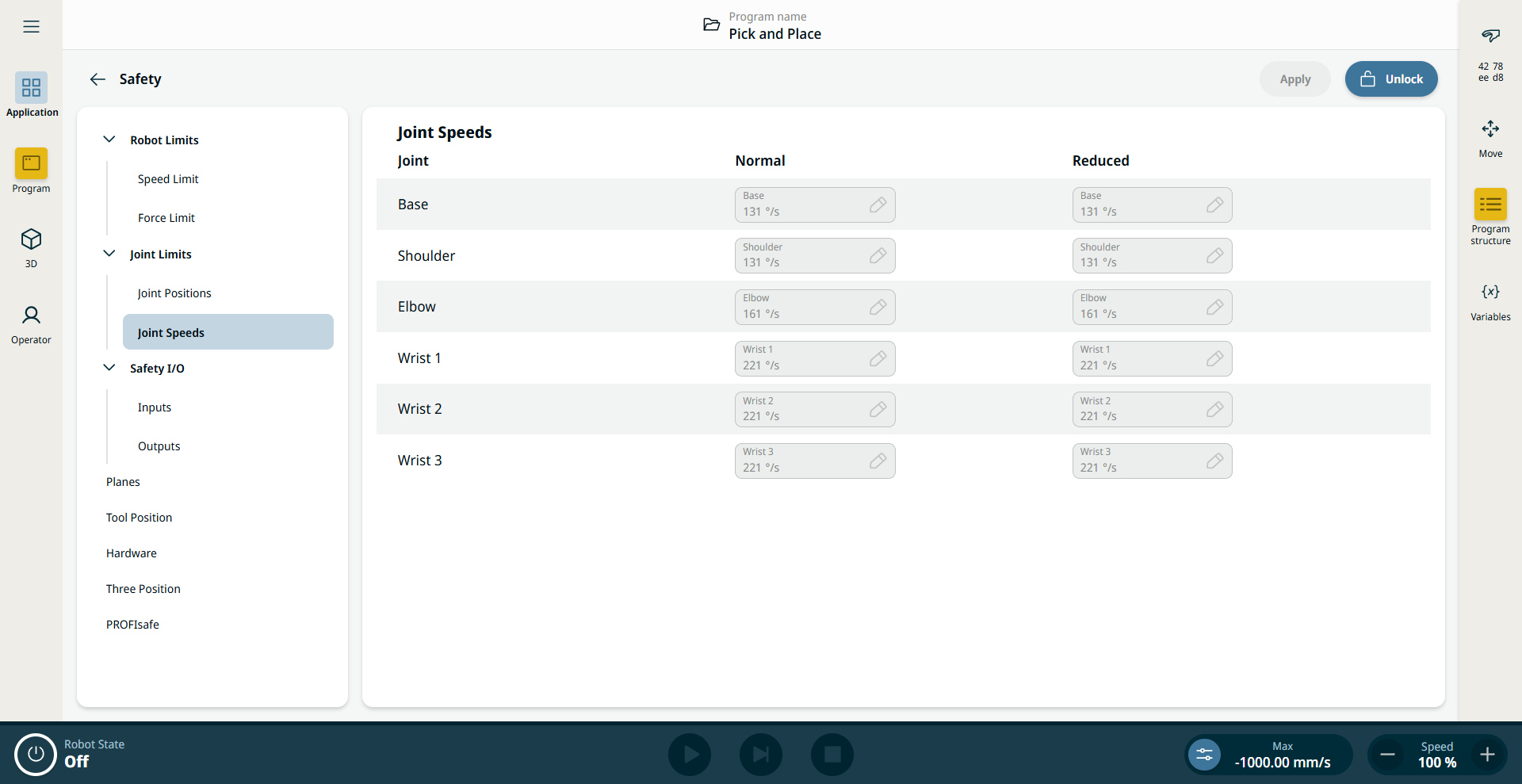
Joint Speeds