Joint Limits
| Description |
Joint limits allow you to restrict individual robot joint movements in joint space by joint rotational position and joint rotational speed. Joint limiting can also be called software-based axis limiting. These are the robot joints:
About the Normal and Reduced safety modes, read Robot Limits.
|
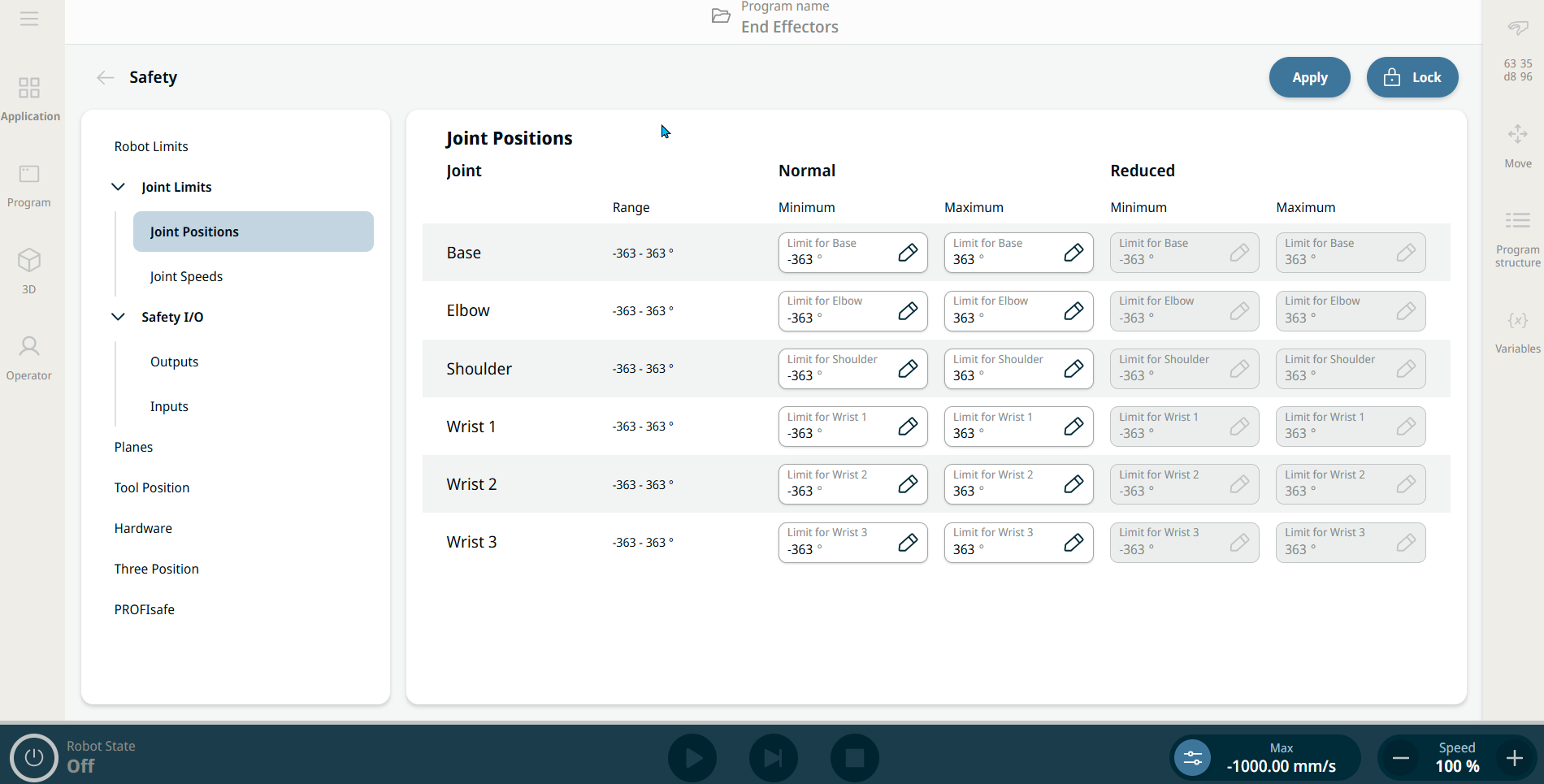
| Joint Positions |
Sets upper and lower limits for the allowed joint positions relative to the base of the robot.
|
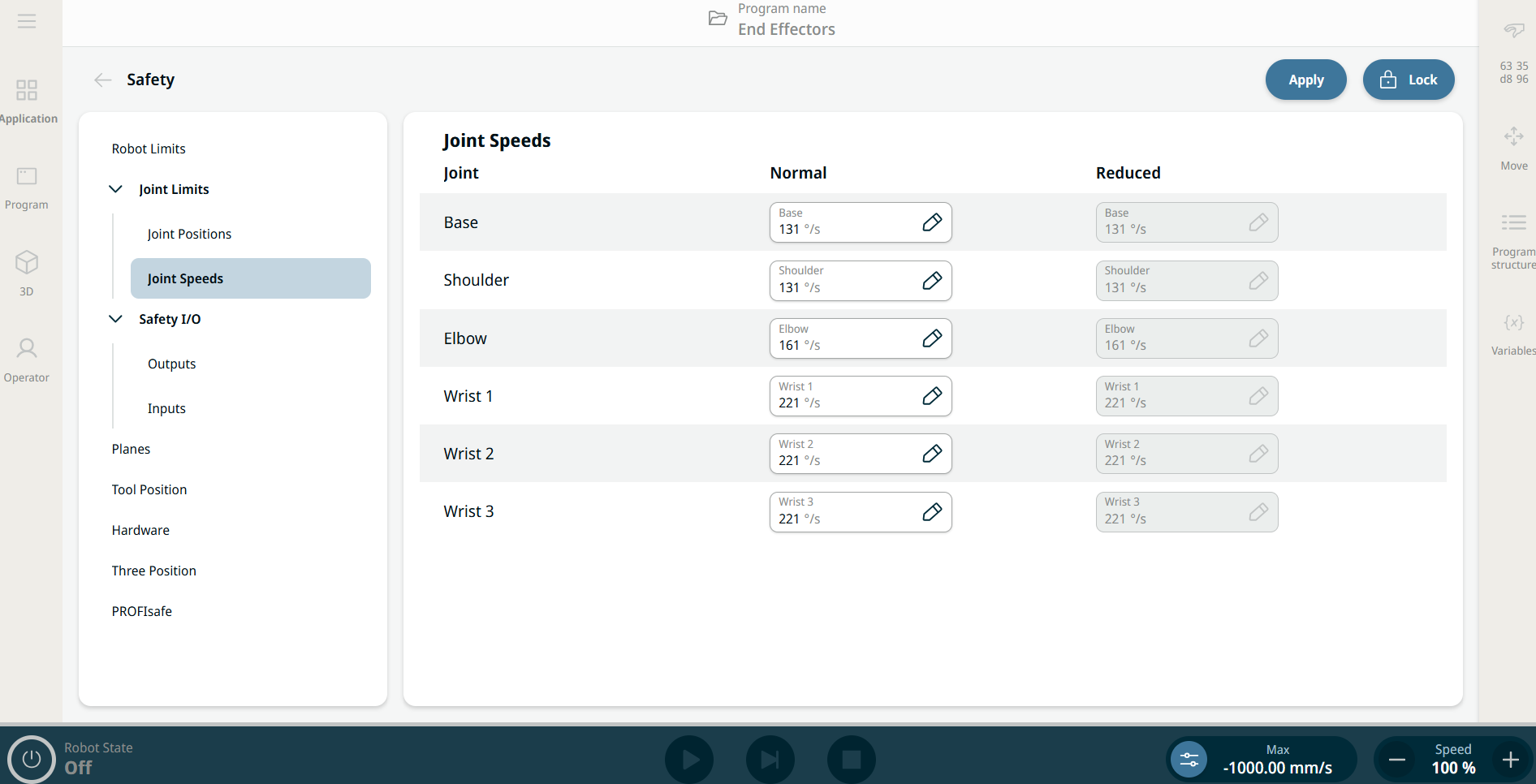
| Joint Speeds |
Sets an upper limit for joint speed relative to the base of the robot.
|