Remote Control
| Description |
Remote Control allows you to control the robots via external sources, such as controller sockets, IOs, and the dashboard server. The other control is via the teach pendant (TP), called local control. Remote control can be used to send simple commands to PolyScope X such as starting or loading programs, as well as sending UR Script commands directly to the controller. To ensure safe usage, the robot can either be in Remote Control mode or Local Control mode.
Local Control mode will ensure that commands sent to the controller from an external source will be rejected while the robot is controlled in person. |
|
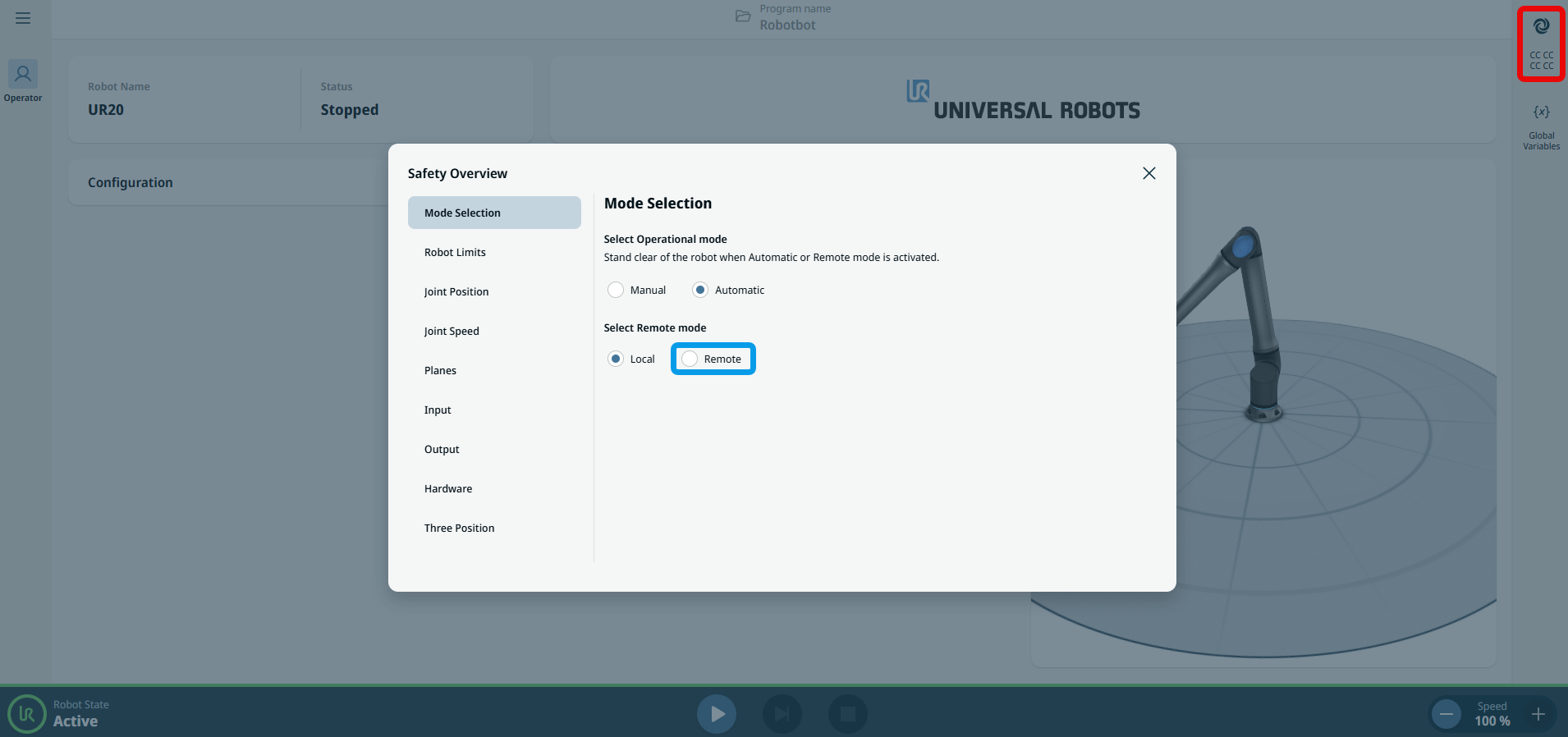
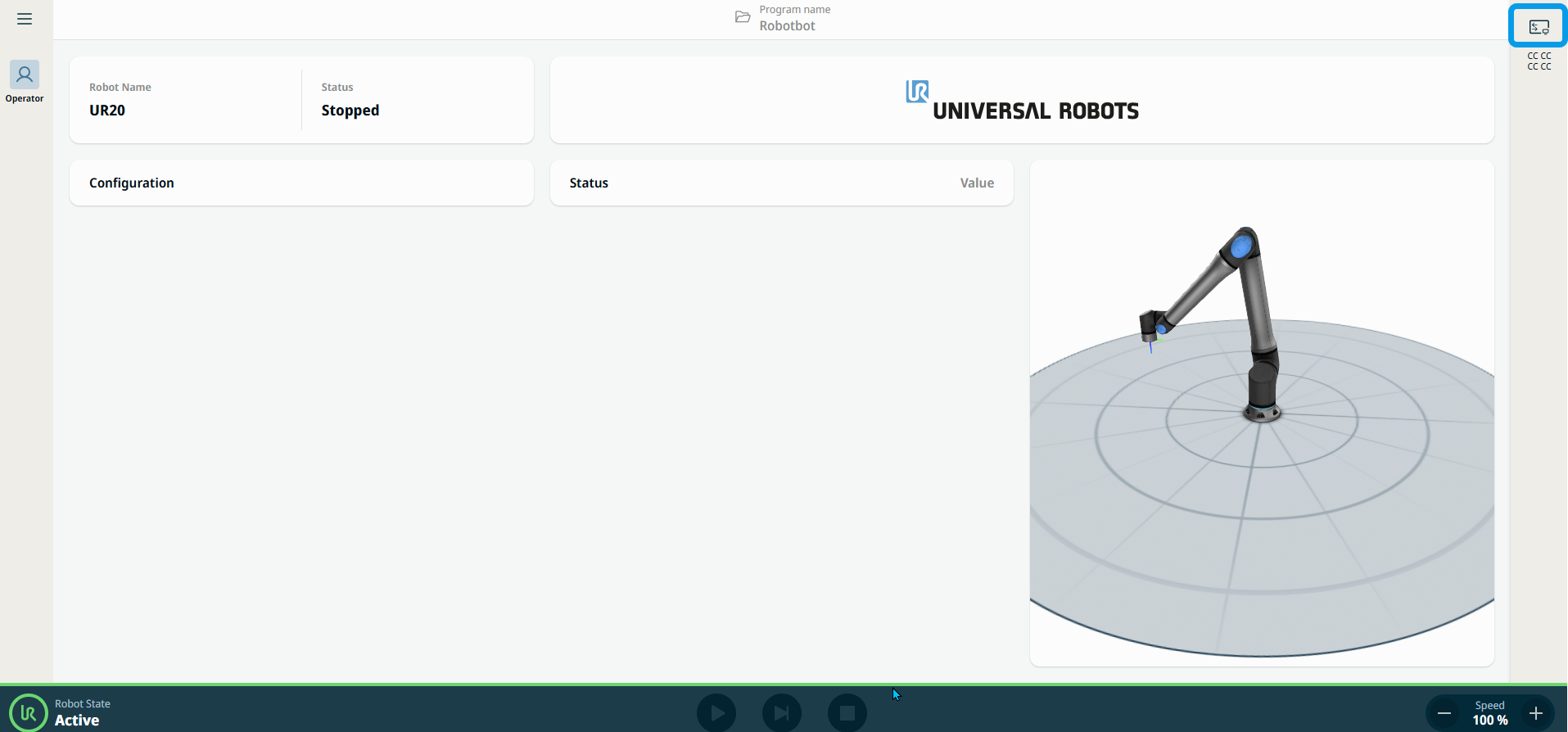
To enable Remote Control |
|
|

|
Local Control does not allow |
|
|
Remote Control does not allow |
|