| To access Wait command
|
-
Go to the main program screen. See Command Nodes.
-
Tap the Wait icon in the Commands toolbox.
A node with two editable fields is inserted into the program tree:
-
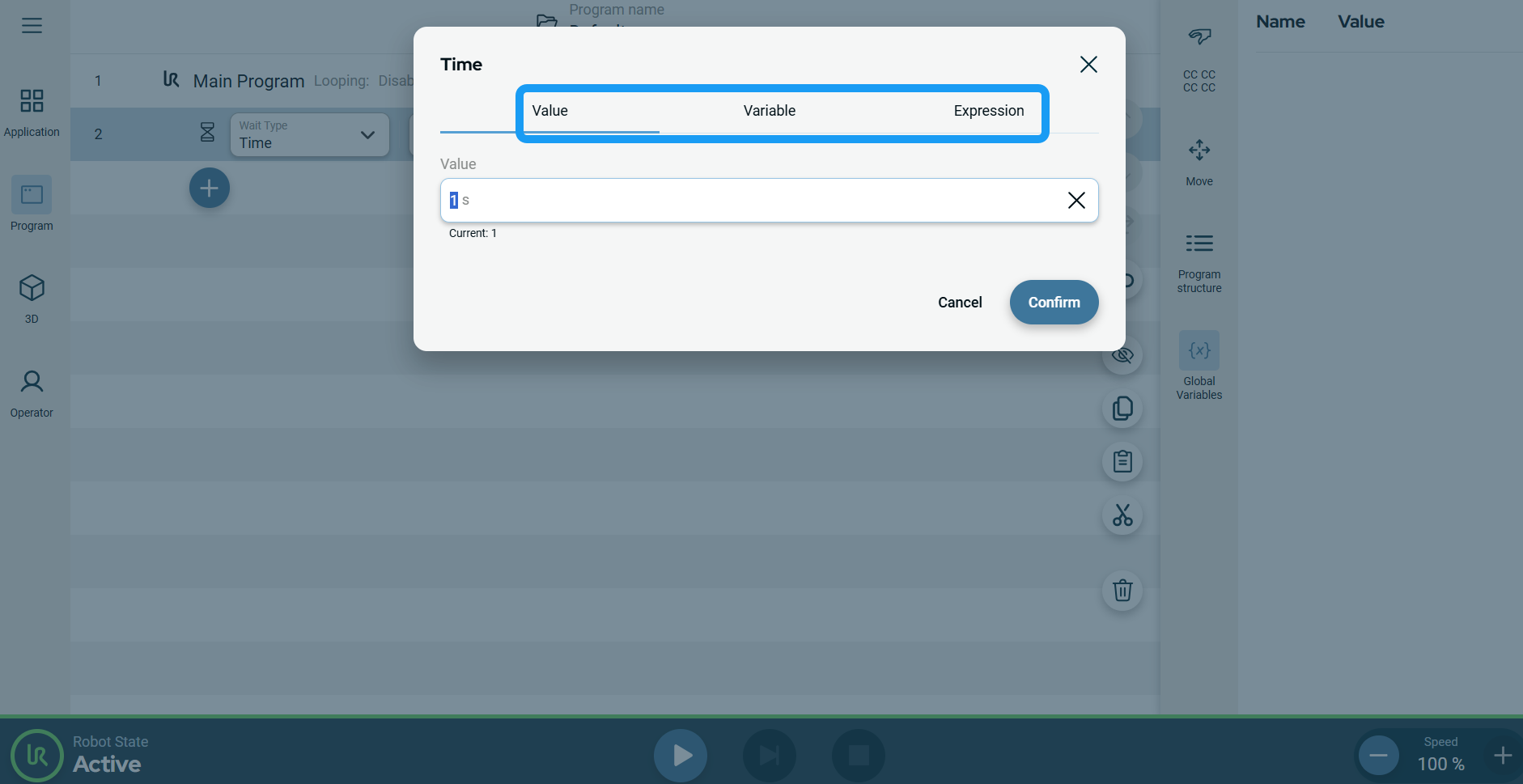
Tap the Wait Type field and choose Time.
When you select this, the program waits for a number of specified seconds.
-
On the Time field, enter the Value and Expression, and tap Confirm. See Value-Variable-Expression Tabs.
|
|
|
-
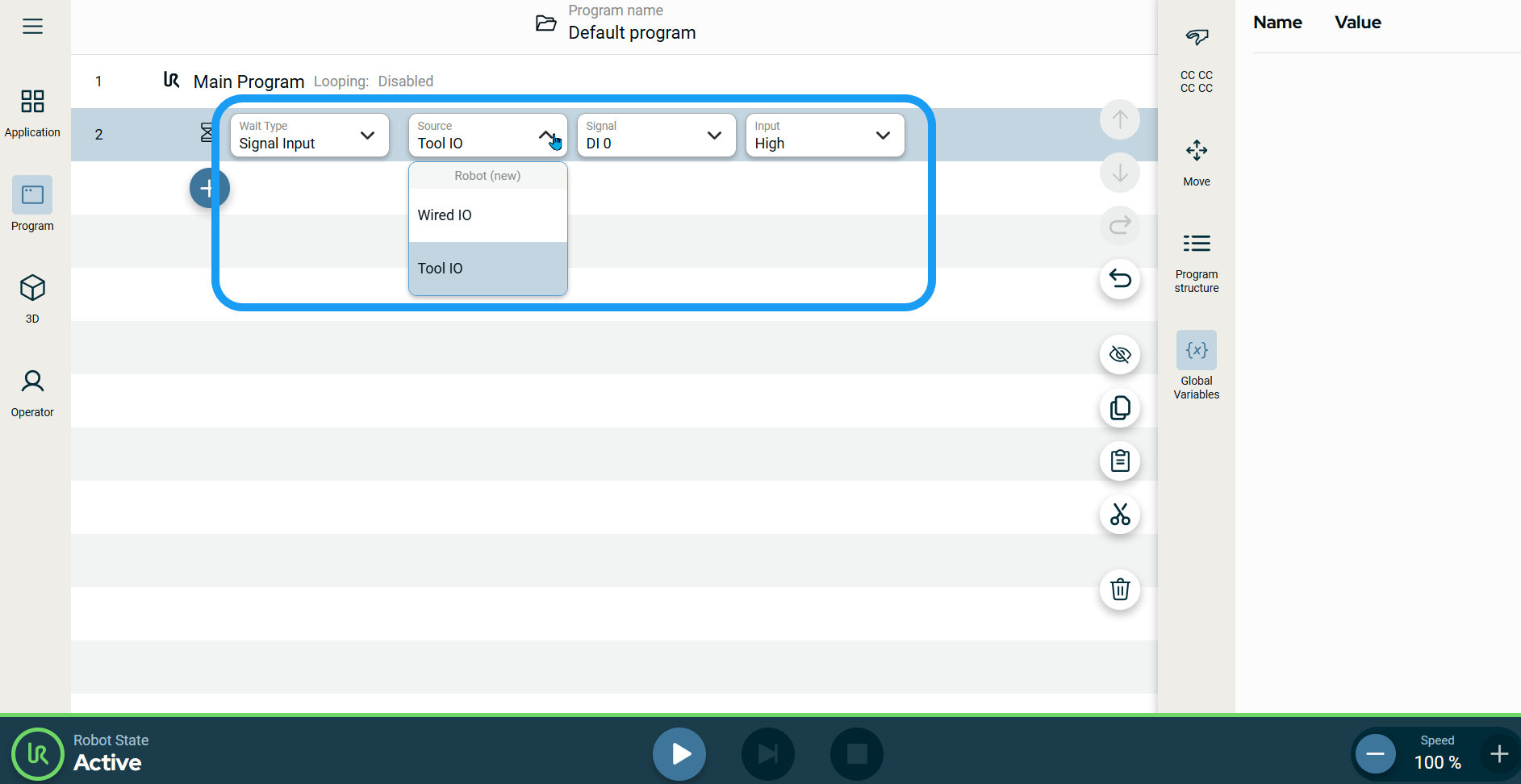
Tap the Wait Type field and choose Signal Input.
When you choose this, additional fields are added to the right for you to specify the type of input.
-
Tap the Source field, and two standard inputs are available:
-
When you choose either Wired IO or Tool IO, a Signal field is inserted to the right.
-
In the Signal field, tap your preferred signal.
When a digital signal is selected, an Input field is inserted to the right.
-
Choose either High or Low.
When an analog signal is selected, Operator and Input fields are inserted to the right.
-
Tap the Operator field.
-
Choose either < or > to specify the wait compared to a value.
-
Edit your Input field and Confirm.
|