
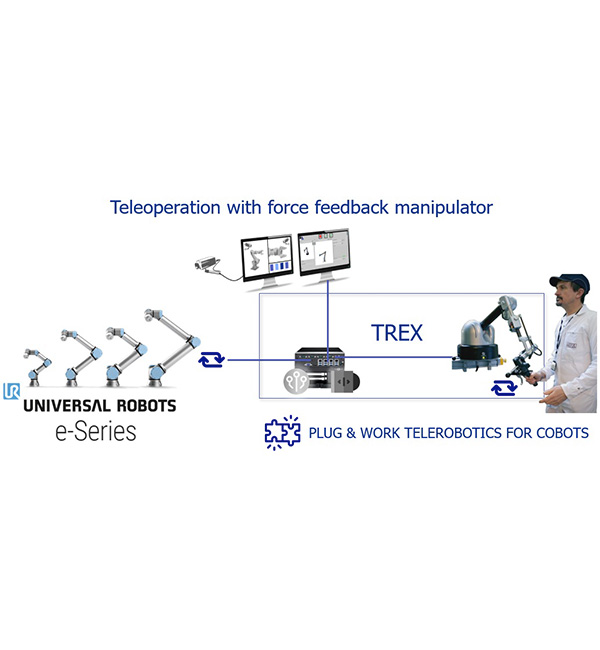
TREX : PLUG & WORK TELEROBOTICS FOR COBOTS
Haption
An immediate proven teleoperation solution for the constrained working environments in industries and research centers.
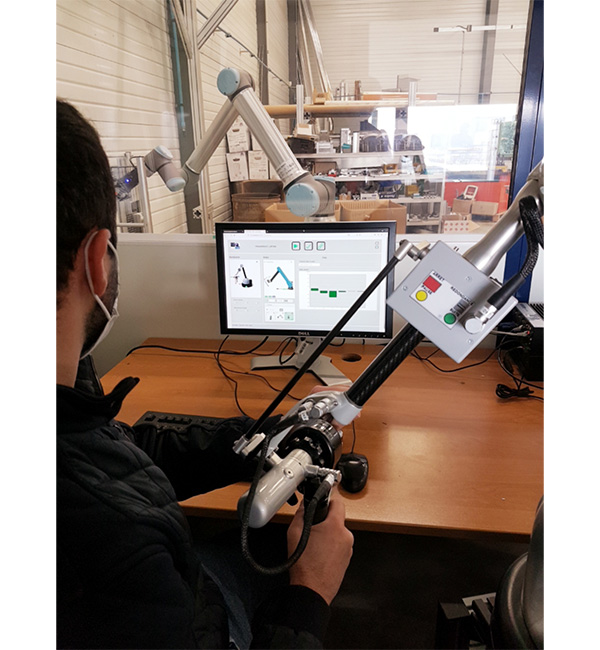
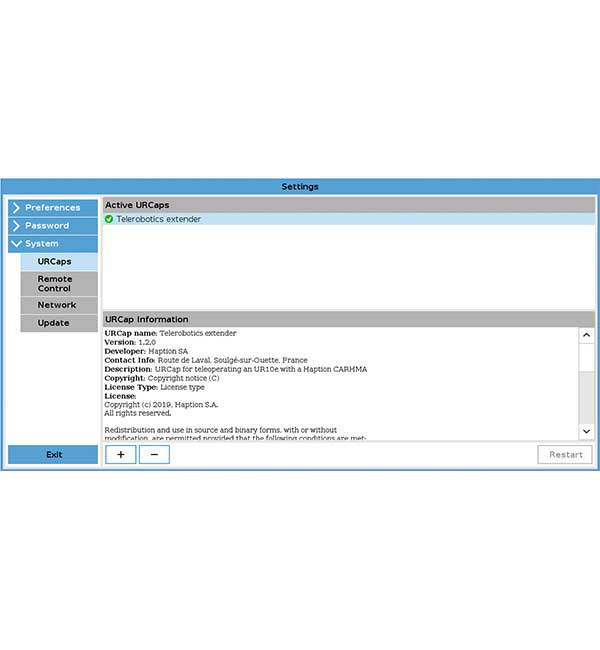
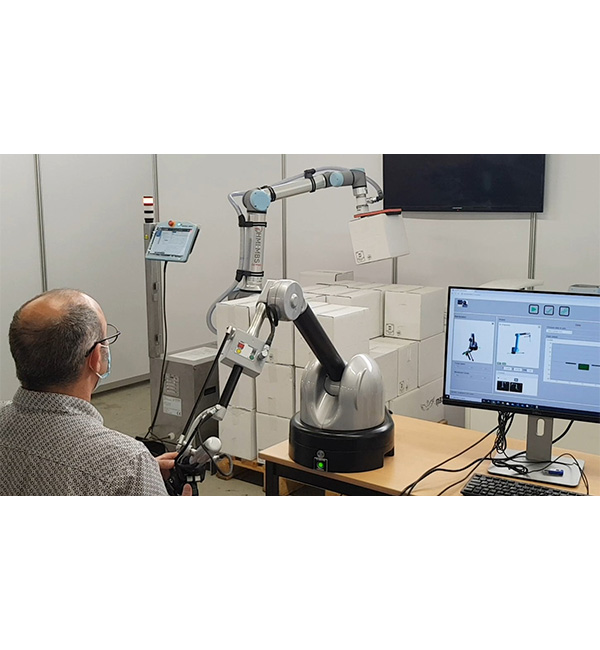
Specifically, the TeleRobotic Extender, aka TREX, combined with a manipulator arm VIRTUOSE 6D TAO offers the operator an intuitive control through physical feel, and immediate control of remote e-series of Universal Robots, without the need for prior programming.
Technical features of TREX provide the best possible complementarity between the safety and precision of robotics on the one hand, and the manual dexterity of the operator on the other. The handling of the e-series of Universal Robots is natural and working tasks are done with much more confidence.
The plug & work solution keeps available the original ECU of the e-series of Universal Robots for the automation experts. In a word, TREX is complementary to automation.


- Universal Robots USA, Inc
- 27175 Haggerty Road, Suite 160
- 48377 Novi, MI