軟體安全限制
| 安全平面模式 |








| 配置安全平面 |
|
| 複製特性 |
在 Copy Feature中,只有Undefined和Base可用。 您可以通过选择 未定义来重置配置的安全平面 如果在“功能”屏幕中修改了复制的功能,则“复制功能”文本右侧会出现一个警告图标。 这表明功能不同步,即属性卡中的信息未更新以反映可能对功能进行的修改。
|

| 颜色代码 |
|

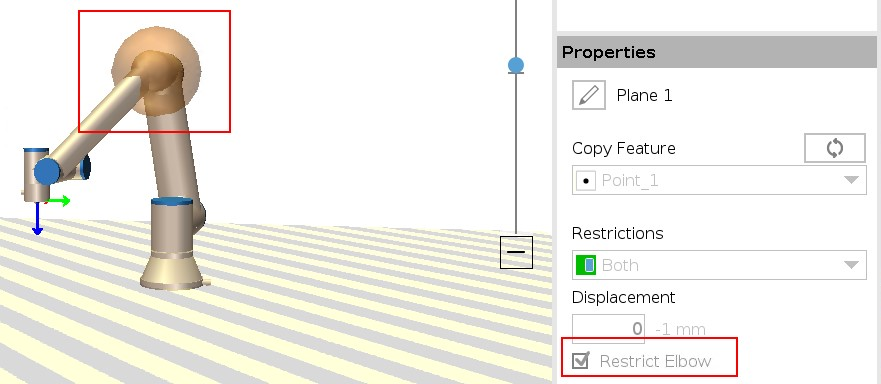
| 肘部限制 |
您可以启用 限制肘部 ,以防止机器人肘关节穿过您定义的任何平面。 禁用限制肘部,以使肘部穿过平面。 肘部限制球的直徑與各種機器人大小均不相同時。
有關特定半徑的資訊,可在機器人 urcontrol.conf 檔案的 [肘部] 中找到。
|
| 工具法蘭限制 |
限制工具法蘭可防止工具法蘭和連接的工具穿過安全平面。 當您限制工具法蘭時,非限制區是安全平面內的區,在該區域內的工具法蘭可正常操作。 工具法蘭不得越過安全平面外的限制區。
移除限制將讓工具法蘭超過安全平面,到達限制區域,而連接的工具仍會在安全平面內。
使用較大的工具偏移時,可移除工具法蘭限制。 這能讓工具的移動距離更大。
限制工具法蘭時需要建立平面特徵。 平面特徵用於稍後在安全設定中設定安全平面。
|
| 新增平面特徵範例 |
「位移」會沿平面法線(平面特徵的 Z 軸),向正方向或負方向偏移平面。 取消勾選「肘部」和「工具法蘭」的核取方塊,它們才不會觸發安全平面。 若您有使用上的需要,可繼續勾選「肘部」。
不受限制的工具法蘭可穿過安全平面,即使沒有定義工具也是。 如果未增加工具,「工具位置」按鈕上的警告會提醒您正確定義工具。 使用不受限制的工具法蘭和定義的工具時,請確認工具的危險部分不會超出和/或超出特定區域。 不受限制的工具法蘭可用於需要安全平面之任何使用,像是焊接或裝配。
|

| 工具法蘭限制範例 |
在此範例中,沿正 Z 軸相對於底座特徵偏移 300mm。 可將平面的 Z 軸視為「指向」限制區域。 如果桌子表面等物體需要安全平面,可以將平面圍繞 X 軸或 Y 軸旋轉 3.142 弧度或 180°,以讓限制區域位於桌子下方。 (提示:將旋轉顯示「旋轉向量 [rad]」改為「RPY [°]」)
如需要,可以稍後在安全設定中向正或負 Z 方向上偏移平面。 若滿意平面的位置,請點按「確定」。
|
