抬升和搬運
| 描述 |
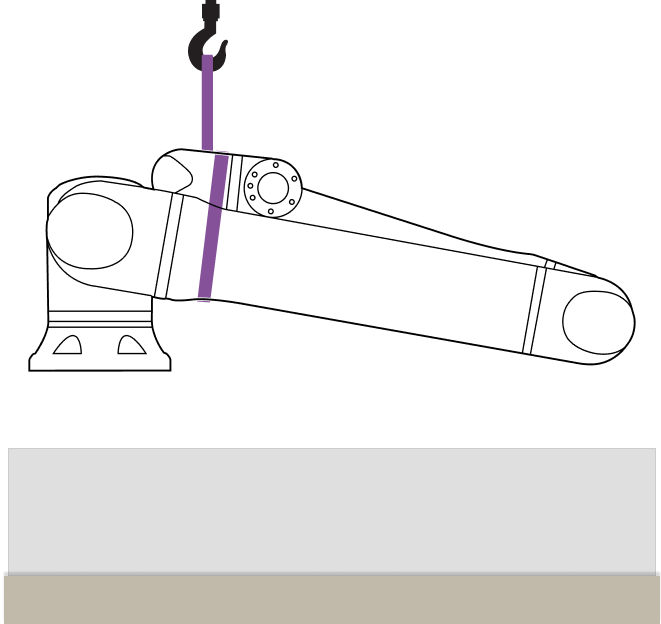
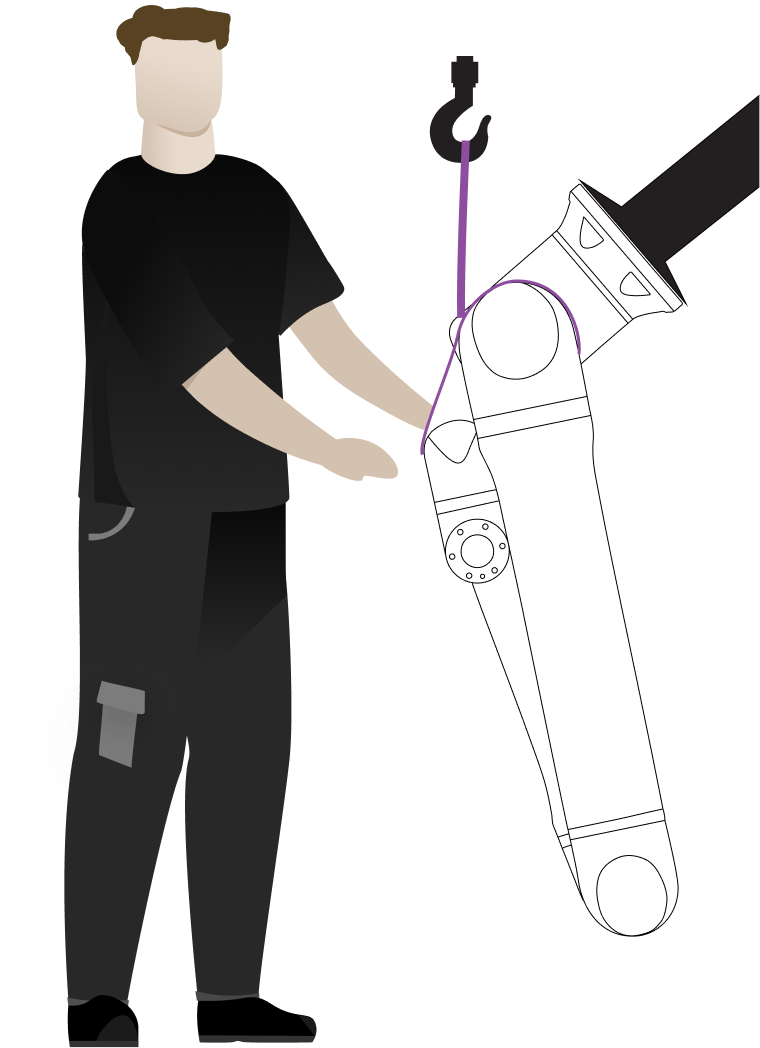
機器人手臂的尺寸和重量各有不同,因此為每種型號採用合適的抬升和搬運技術非常重要。 您可以在此處取得關於如何安全抬升和搬運機器人的資訊。
|
| 正確的抬升和搬運 |
|
|
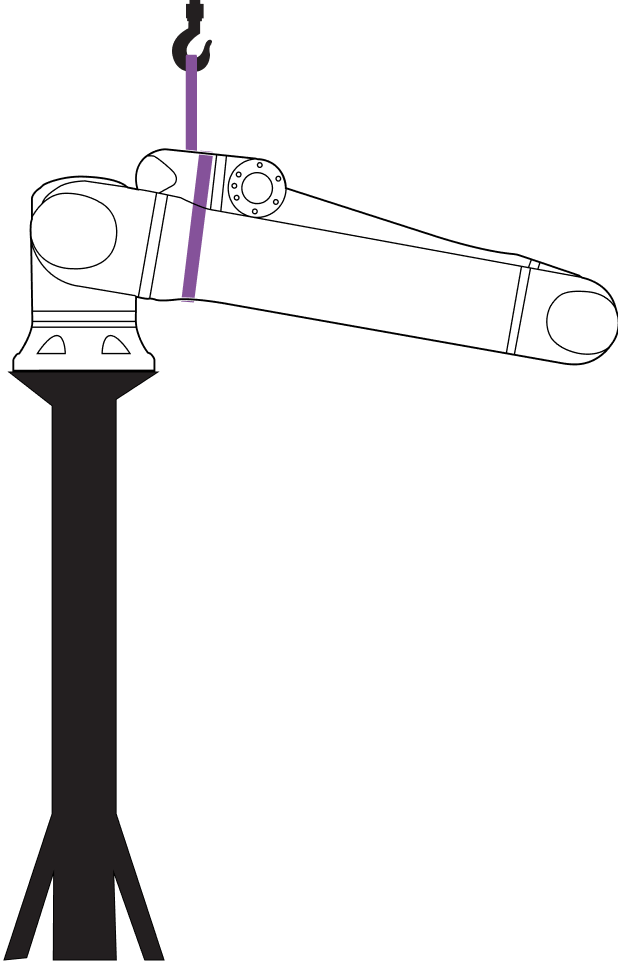
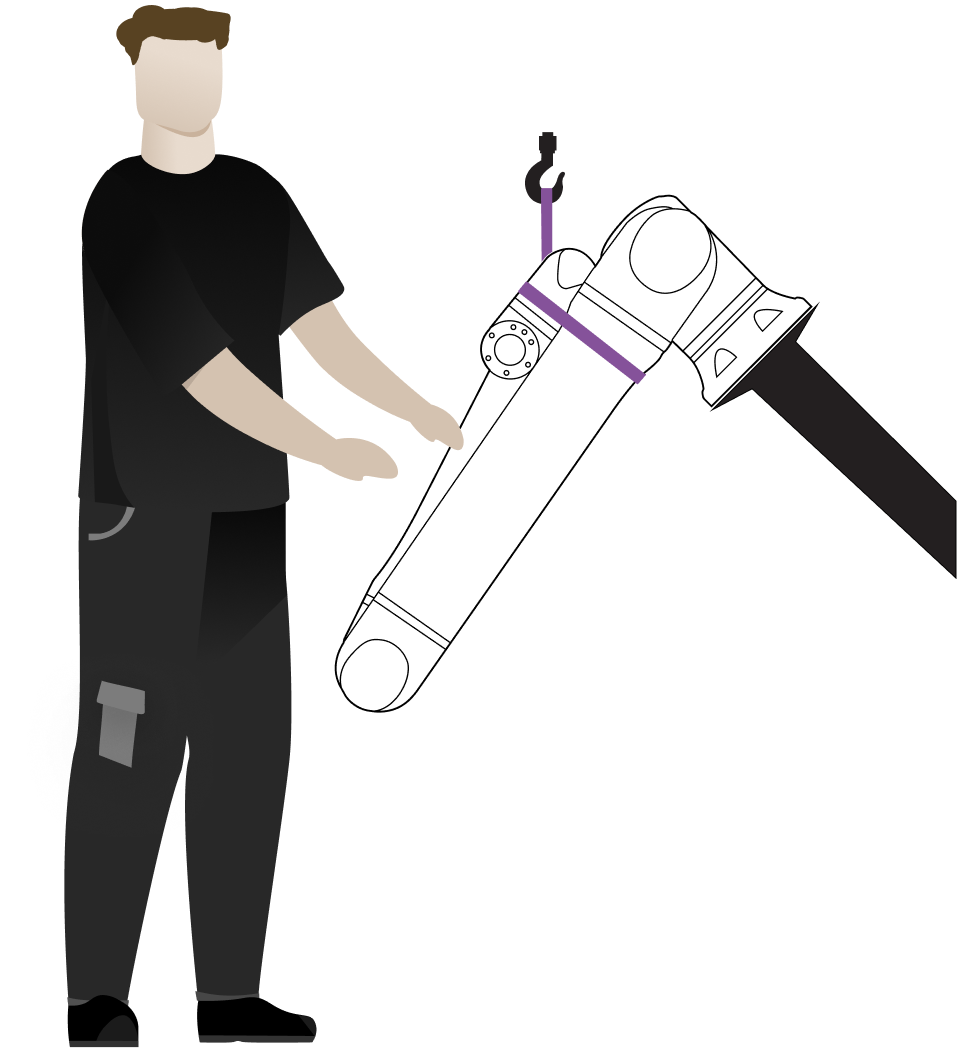
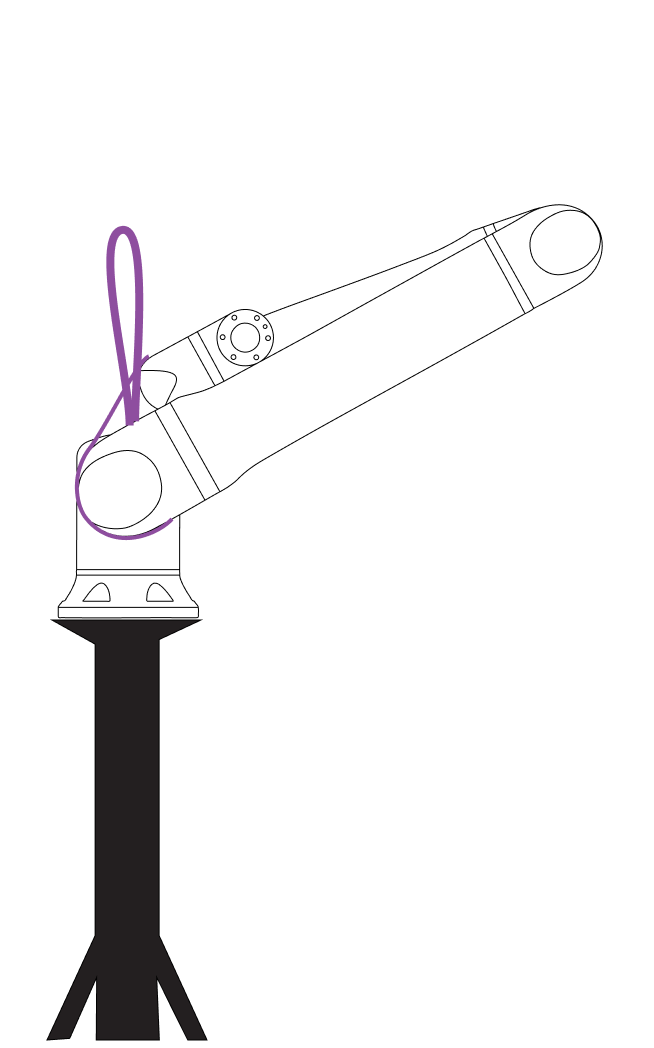
| 安裝機器人手臂 |
機器人手臂可以側向安裝、倒置安裝或傾斜角度安裝 (±45°)。
|
|
|
|
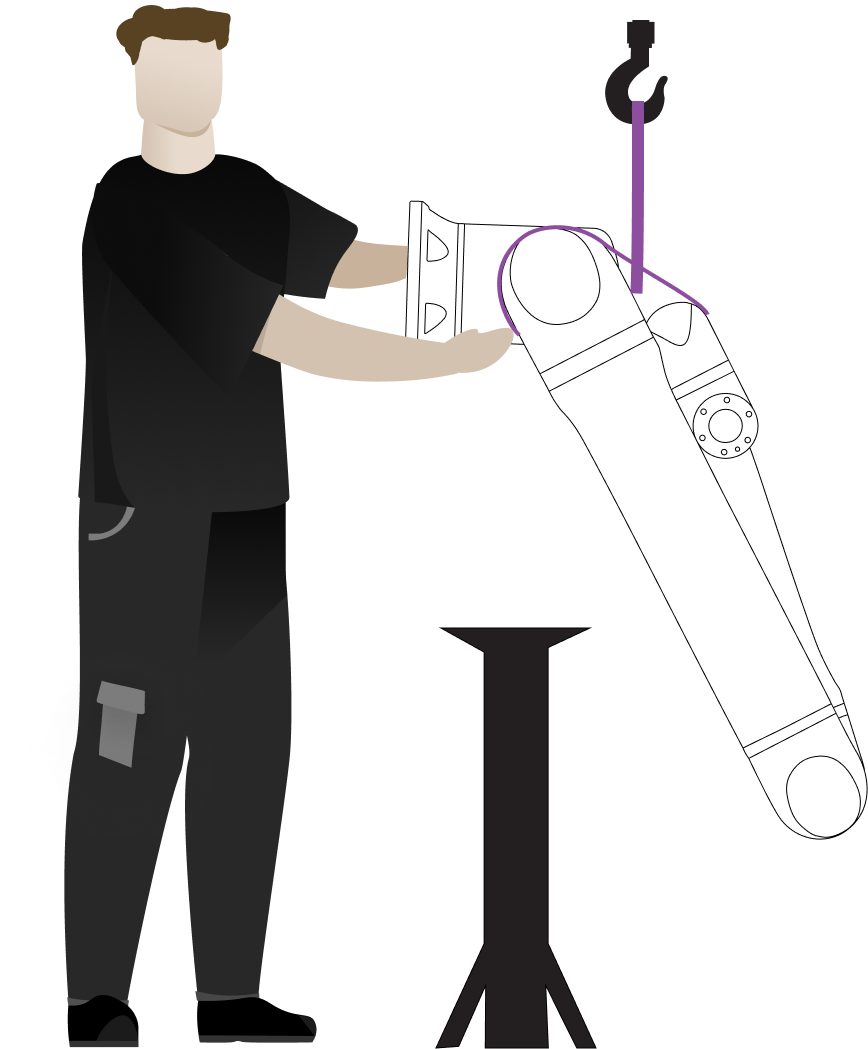
抬起或移動重型零件可能會造成人員受傷。
組件和/或配線的錯誤組裝可能導致人員受傷。
|
|
|
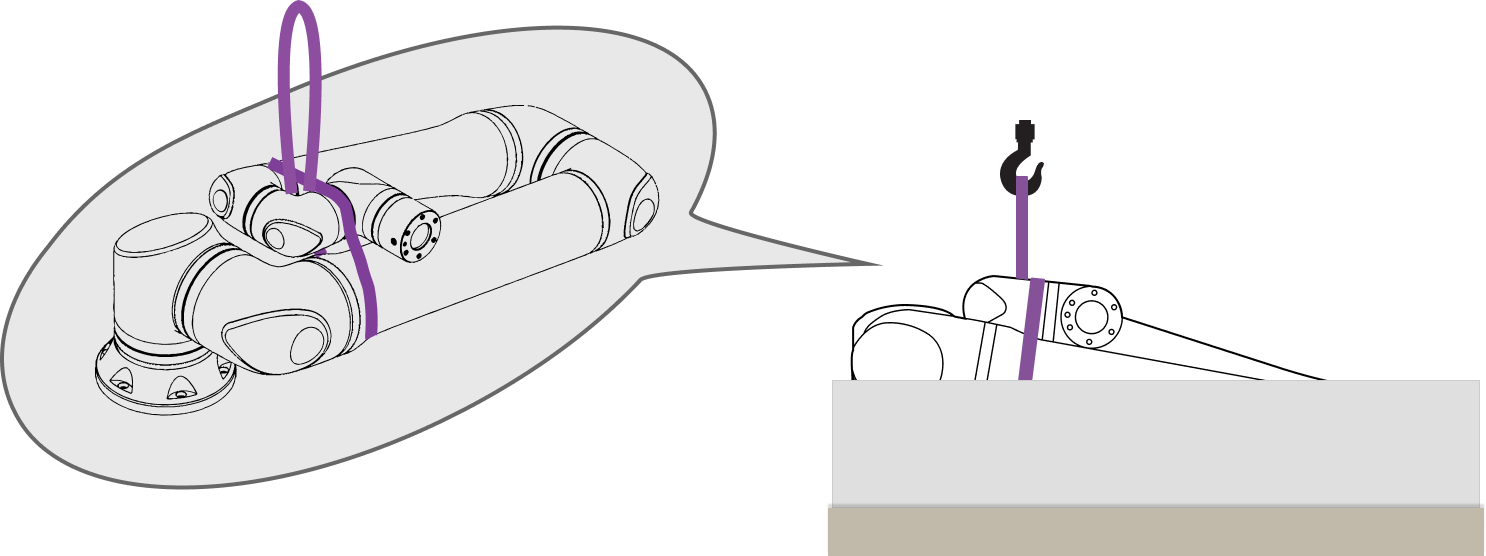
如果未能為機器人的重量使用適當的抬升裝置,可能會導致人員受傷和財產損失。 對於 UR30:
對於 UR20:
對於 UR15:
對於 UR8 Long:
對於 UR18:
您所在地區可能有關於裝配抬升設備的具體規定。
有關安裝說明詳情,請參閱「組裝」一節。
|