等待
| 描述 |
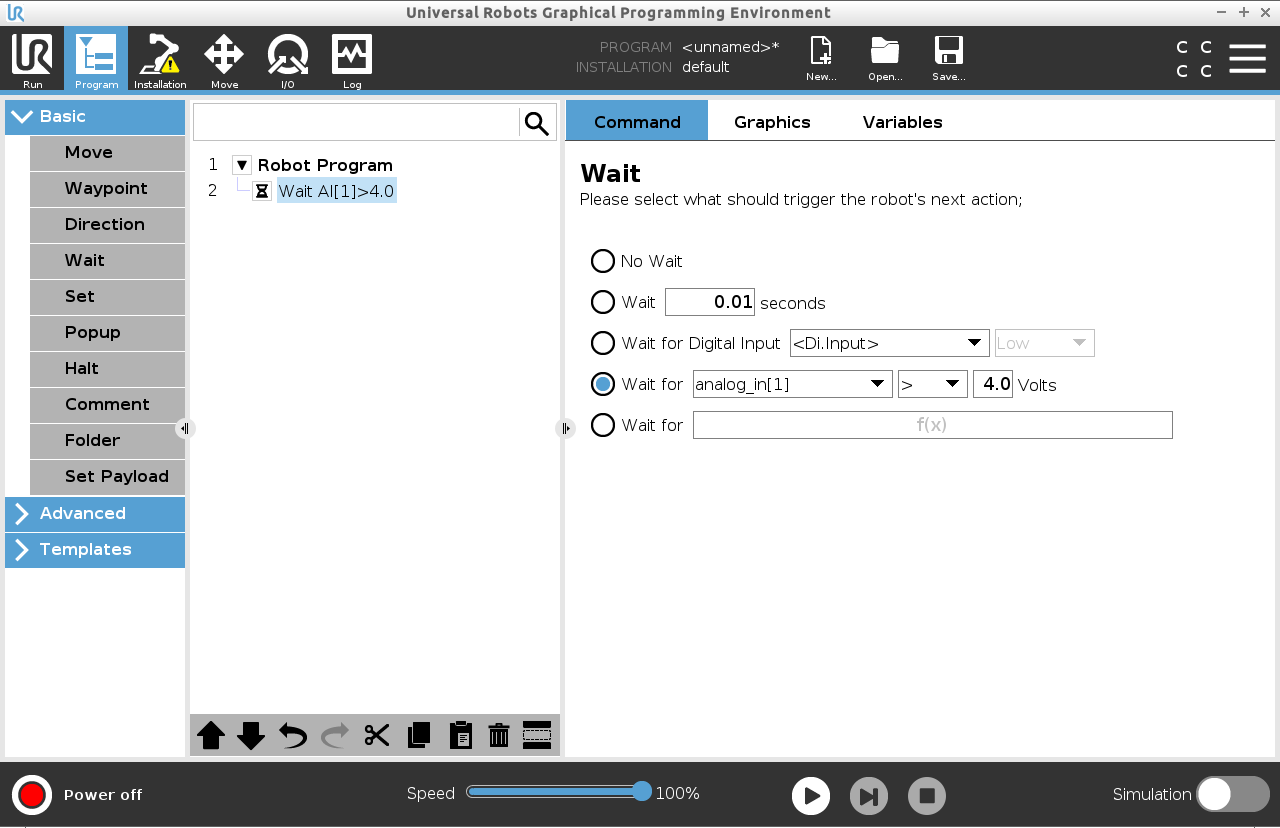
「等待」命令可對機器人行為執行額外控制。 當程式中引進新的輸入時,「等待」命令會暫停機器人移動。
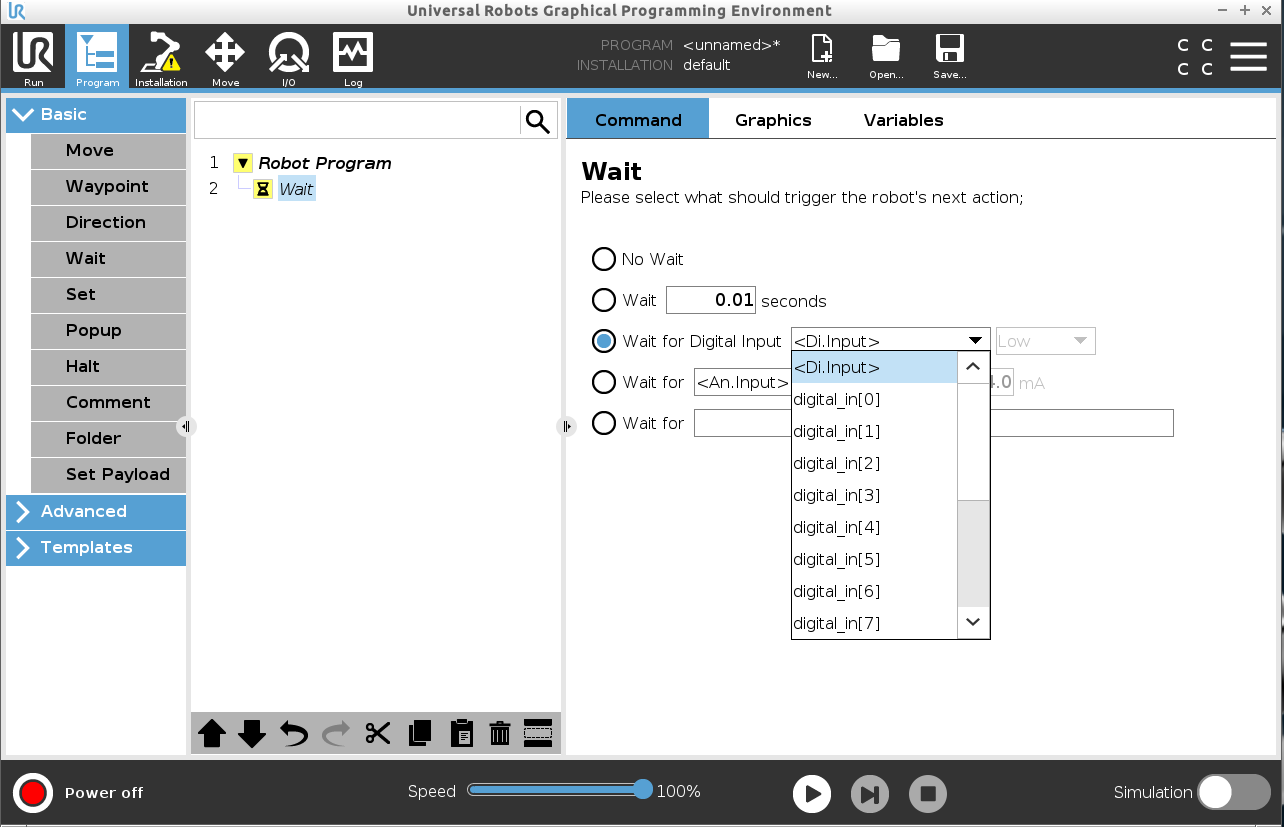
您可以將「等待」命令新增至有外部感測器的程式中,讓機器人在程式繼續前等待其中一個感測器啟動。
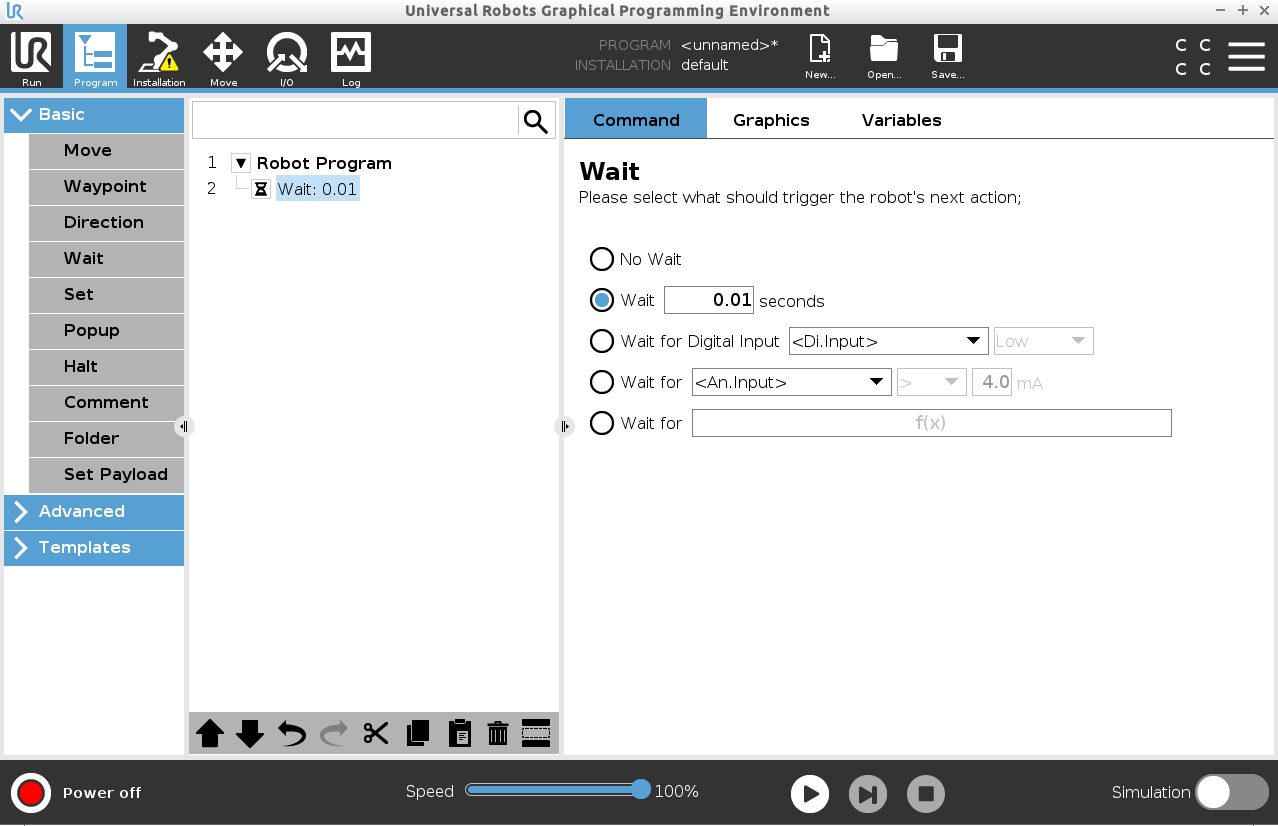
當您將「等待」新增到程式樹時,「等待」窗格會出現在畫面右側。
請參閱下列關於使用「等待」命令的章節:
|
| 若要在機器人程式中新增「等待」 |
「不等待」可讓機器人在繼續運行程式之前不執行任何操作。 在新輸入之前不會停頓。 |
|
|
在寫機器人程式時,可以使用「不等待」命令作為臨時佔位符。
|