有效負載
| 說明 |
您必須設定有效負載、CoG 和慣性,才能讓機器人發揮最佳效能。 您可以定義多個有效負載,並在您的程式中在切換這些有效負載。 這在「拾取和放置」應用程式中很有用,例如,機器人拾起和放下物件的地方。
|

| 新增、重新命名、修改和刪除有效負載 |
您可以依照下列操作開始設定新的有效負載:
|
 以唯一名稱來定義新的有效負載。 新的有效負載顯示於下拉式選單中。
以唯一名稱來定義新的有效負載。 新的有效負載顯示於下拉式選單中。 以重新命名有效負載。
以重新命名有效負載。 以刪除所選的有效負載。 不得移除最後一個有效負載。
以刪除所選的有效負載。 不得移除最後一個有效負載。| 有效負載 |
下拉式選單中的勾號表示啟用中的有效負載 |
 。
可使用
。
可使用 變更啟用中的有效負載。
變更啟用中的有效負載。
| 預設有效負載 |
在開始執行程式之前,將預設有效負載設定為啟用。
下拉式選單中的綠色圖示代表預設的已配置有效負載
|
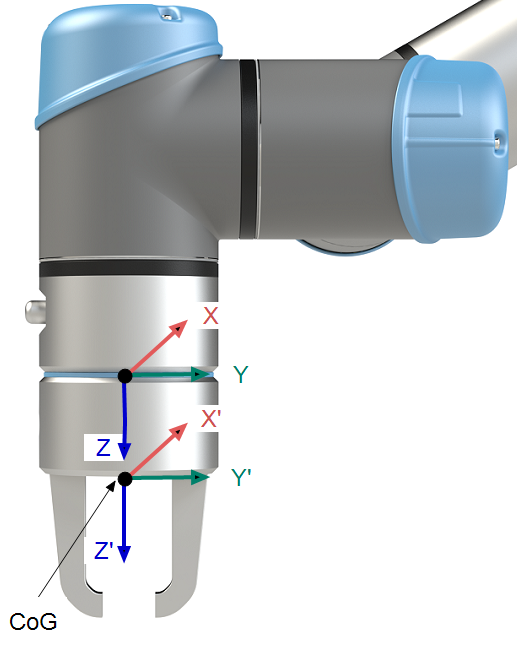
| 設置重心 |
點按 |
| Payload Estimation |
此功能允許機器人幫助設置正確的有效載荷和重心 (CoG)。
|
| 設定慣性值 |
您可以選取使用自訂慣性矩陣來設定慣性值。 點擊欄位: 慣性在坐標系統中定出,其原點位於有效負載的重心 (CoG) 位置,而軸與工具法蘭軸對齊。 預設慣性的計算是依據球體的慣性以及使用者指定的質量,該質量密度為1g/cm3
|