確認支架尺寸
| 說明 |
安裝機器人手臂的結構(支架)是機器人安裝的關鍵部分。 支架必須堅固,沒有任何源自外部的振動。
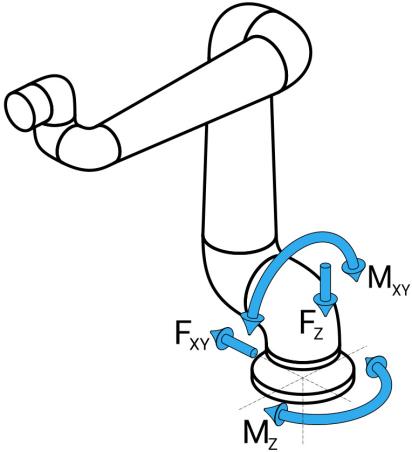
每個機器人關節都會產生扭矩,讓機器人手臂移動和停止。 在正常不間斷操作和停止運動期間,關節扭矩會以下列方式傳遞到機器人支架:
底座法蘭定義的力和力矩。 |
|
確認支架尺寸 |
負載的大小取決於機器人型號、程式和多個其他因素。 支架的尺寸應考慮機器人手臂在正常不間斷運行期間以及在類別 0、1 和 2 停止運動期間產生的負載。
在停止運動期間,允許關節超過最大標稱操作扭矩。 停止運動期間的負載與停止類別的類型無關。 下表所列的值是在最差情況下運動中的最大標稱負載乘以 2.5 的安全係數。 實際負載不會超過這些值。
0、1 和 2 類停止期間的最大關節扭矩。
正常運作期間的最大關節扭矩。
通常可透過降低關節的加速度限制來減低正常操作負載。 實際操作負載取決於應用和機器人程式。 您可以使用 URSim 評估特定應用中的預期負載。 |
安全邊界 |
您可以納入額外的安全邊界,並考量到下列設計元素:
|