基本程序節點:移動
| 說明 |
「移動」命令可讓機器人從 A 點移動到 B 點。機器人的移動方式,對機器人正在執行的任務很重要。 當您將「移動」新增到程式樹時,「移動」窗格會出現在畫面右側。 「移動」窗格中的選項可讓您配置「移動」和附加的路點。
|
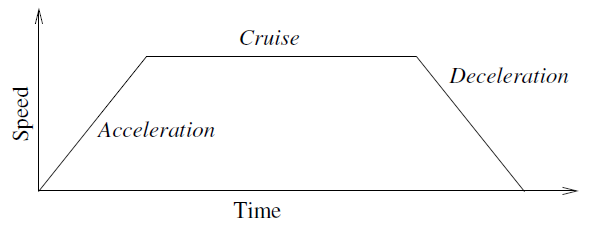
| 速度設定 |
適用於運動類型的共享參數是最大關節速度和關節加速度。
|
|
OptiMove 是運動控制選項,可指定機器人的速度和加速度,同時維持硬體限制。 這代表機器人的最佳運動不會超過所需限制。 因此, 100% 是硬體限制內的最大速度百分比和加速度。
|

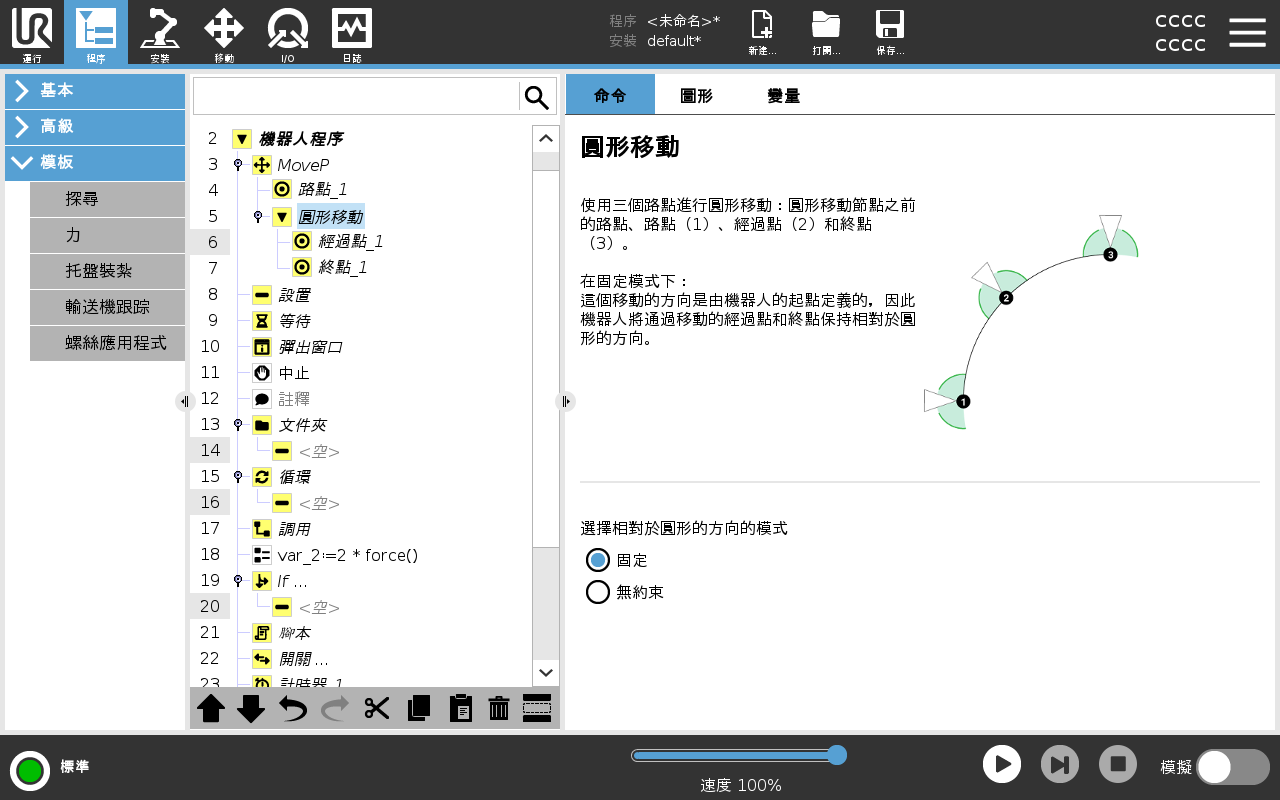
| 移動命令 |
當您為程式新增「移動」命令時,會自動加入路點。 您也可以使用「移動」命令來設定機器人手臂在路點之間移動的加速度和速度。
機器人使用四個「移動」命令移動,如下列章節所述:
|
| 移動 J |
移動 J 命令可建立機器人從點 A 到點 B 的最佳移動路徑。 該移動路徑可能不是 A 和 B 之間的直線,但是對關節的開始位置和關節的結束位置而言是最佳的。 |
| 新增移動 J |
|
| 新增附有 OptiMove 的移動 J |
|
當使用移動 J 定義路點時,以「使用關節角度」選項作為 3D 位姿的替代方案。
如果程式在機器人之間移動,則不會改變使用關節角度定義的路點。 當您要在新機器人中安裝程式時,這會很有用。
使用「使用關節角度」會讓 TCP 選項和特徵無法使用。 |
|
如果您需要在機器人程式執行期間變更 TCP,則可使用此設定。 如果您需要在機器人程式執行時控制不同物體,則可使用此設定。 機器人移動的方式係根據哪個 TCP 設為啟動的 TCP 來進行調整。 忽略活动TCP 允许相对于工具法兰调整此移动。 |
|
| 在「移動」中設定 TCP |
|
|
這對您在設定路點時非常有用(請參閱特徵)。
在下列情況下可以使用「特徵」: |
|
移動畫面右下方的共享參數適用於機器人手臂從上一個位置移至命令下第一個路點的路徑,以及該路點到每個後續路點的路徑。 移動命令設定不適用於移動命令下從最後一個路點延伸的路徑。
|