最大有效負載
| 說明 |
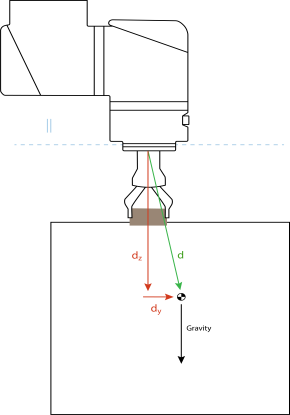
額定機器人手臂有效負載取決於有效載荷的重心( CoG )偏移,如下所示。 重心偏移定義為:工具法蘭的中心與附加有效負載的重心之間的距離。
如果有效負載放置在工具法蘭下方,機器人手臂可以適應較長的重心偏移。 例如,在計算拾取和放置應用程式中的有效負載質量時,請同時考慮夾爪和工件。
如果有效負載重心超出機器人的觸及範圍和有效負載,機器人的加速能力可能會降低。 您可以在「技術規格」中驗證機器人的觸及範圍和有效負載。
|
 擴展有效負載的 擴展有效負載的
 完整效能 完整效能
|
額定有效負載與重心偏移之間的關係。
|
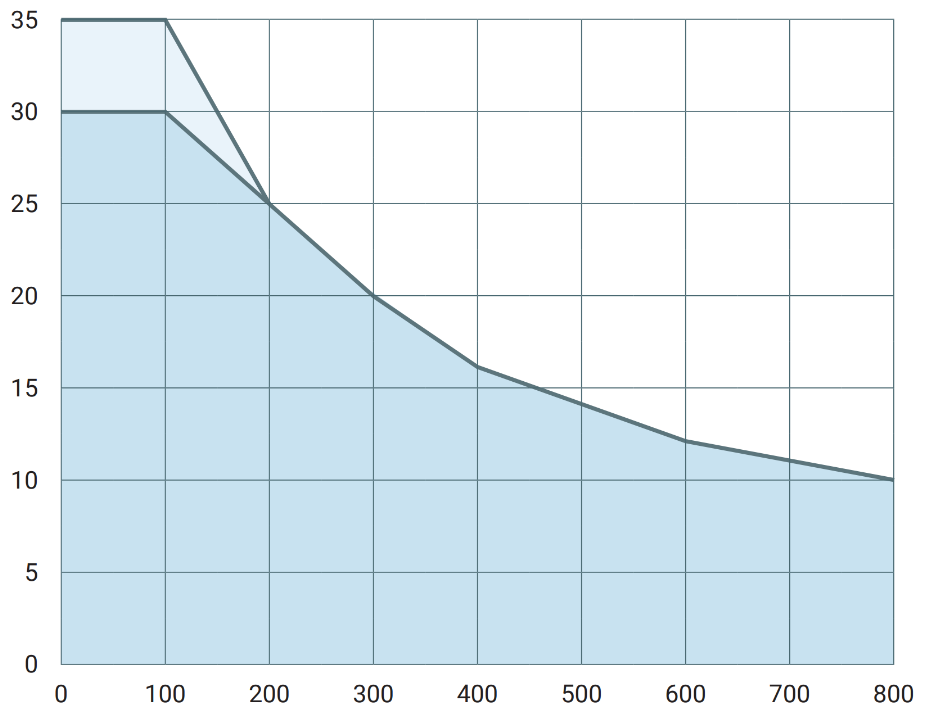
| 有效負載容量增加 |
如果有效負載放置在工具法蘭下方,則機器人手臂可以適應更高的有效負載和更長的重心偏移。 您可以根據下列標準增加機器人手臂的最大有效負載容量:
如何計算水平重心偏移的例子。
如上所示,水平有效負載偏移量 dy 應在有效負載曲線內。
任何機器人安裝方向都可以有擴展的有效負載。
增加最大有效負載容量,可能會導致機器人以較低的速度和加速度移動。 關節上的負載較高,可能會限制機器人工作範圍內的某些運動。 機器人軟體可自動確保不超出機器人的機械限制。 使用擴展的有效負載範圍不會讓此機器人的機器人保固失效。 |
| 有效負載慣性 |
正確設定有效載荷後,您就可以配置高慣性有效負載。 正確設定下列參數後,控制器軟體就會自動調整加速度:
您可以使用 URSim 來評估特定有效負載的機器人動作的加速和循環時間。
|