首次開機
| 描述 |
初次啟動是組裝機器人後可為機器人執行的初始操作序列。 此初始序列需請您:
|
|
在啟動機器人手臂之前,若未驗證有效負載和安裝,可能會導致人員受傷和/或財產損失。
有效負載和安裝的設定若是不正確,機器人手臂和控制箱將無法正常運作。
在較低的溫度下啟動機器人可能會導致效能變低或停止,因為溫度和油以及油的黏度有關。
|
打開機器人電源
| 打開機器人電源 |
打開機器人電源會啟動控制箱,並在 TP 螢幕上載入顯示畫面。
|
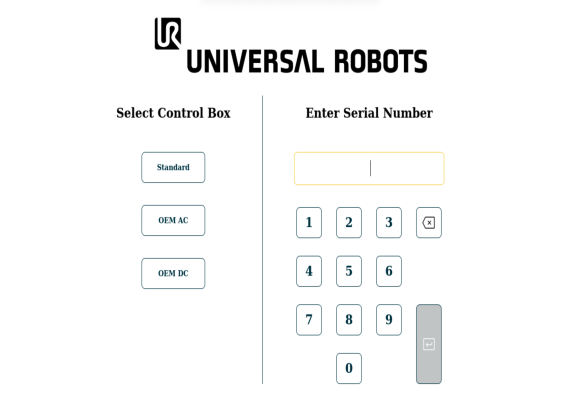
插入序號
| 插入序號 |
初次安裝機器人時,需在機器人手臂上輸入序號。 當您重新安裝軟體時,也需執行此程式。 例如,當您安裝軟體更新時。 |
|
|
載入開始畫面可能需要幾分鐘。
|
啟動機器人手臂
| 啟動機器人 |
啟動機器人手臂會解除剎車系統,讓您開始移動機器人手臂並開始使用 PolyScope X。
|


當機器人手臂狀態從「閒置」變成「正常」時,將根據機器人手臂的配置安裝檢查感測器資料。 如果安裝已驗證,請點按「 開始」以繼續解除所有關節剎車,為操作機器人手臂做好準備。
|

關閉機器人電源
| 關閉機器人手臂 |
意外啟動和/或移動可能導致受傷。
現在您可以:
|