奇點
| 描述 |
奇點是會限制運動和定位機器人的位姿。 機器人手臂在接近和離開奇點時,可能會停止移動,或是非常突然且快速地移動。 將機器人放置在工作空間中和定義操作空間時,務必考量下列詳述的奇點位置。 確保機器人在奇點附近運動,不會對機器人手臂、末端執行器和工件範圍內的任何人造成危害。
下列因素會導致機器人手臂出現奇點:
|
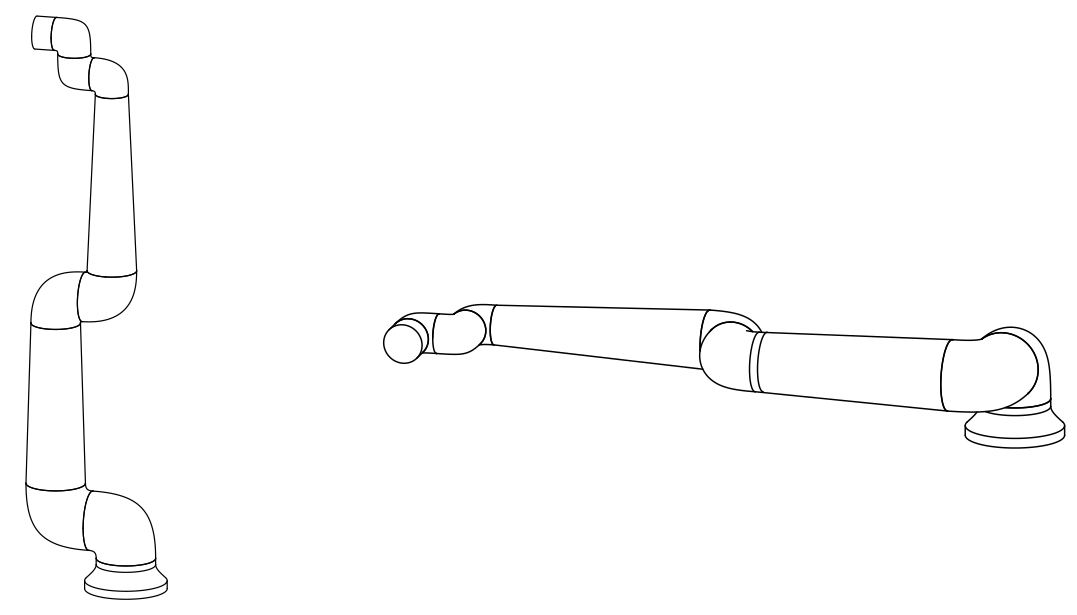
| 外部工作空間限制
|
奇點發生是因為機器人無法到達足夠遠的地方,或是超出了最大工作區域。
為避免此情形:請將設備放在機器人周圍,避免機器人超出建議的工作空間。
|
| 內部工作空間限制
|
奇點的發生是因為在機器人底座的正上方或正下方運動。 這會導致無法到達許多位置/方向。
為避免此情形:為機器人任務編寫程式,使機器人不必在中央軸內或靠近中央軸運作。 您也可以考慮將機器人底座安裝在水平表面上,將中央軸從垂直方向旋轉到水平方向,而使其遠離任務的關鍵區域。
|
| 手腕對齊
|
奇點的發生是因為腕關節 2 與肩部、肘部和腕關節 1 在同一平面上旋轉。 這限制了機器人手臂的移動範圍,無論工作空間為何。
為避免此情形:佈局機器人任務,使機器人不必以此方式對齊機器人手腕關節。 您也可以偏移工具的方向,以便工具可以水平指向,而不會有手腕對齊的問題。
|