安全 I/O 訊號
| 描述 |
I/O 分為輸入和輸出,並成對出現以便為每個功能提供 3 類 PLd 效能。
當從 I/O 或現場總線輸入啟動程式時,機器人可以從它所處的位置開始移動,不必透過 PolyScope 手動移動到第一個路點。
|
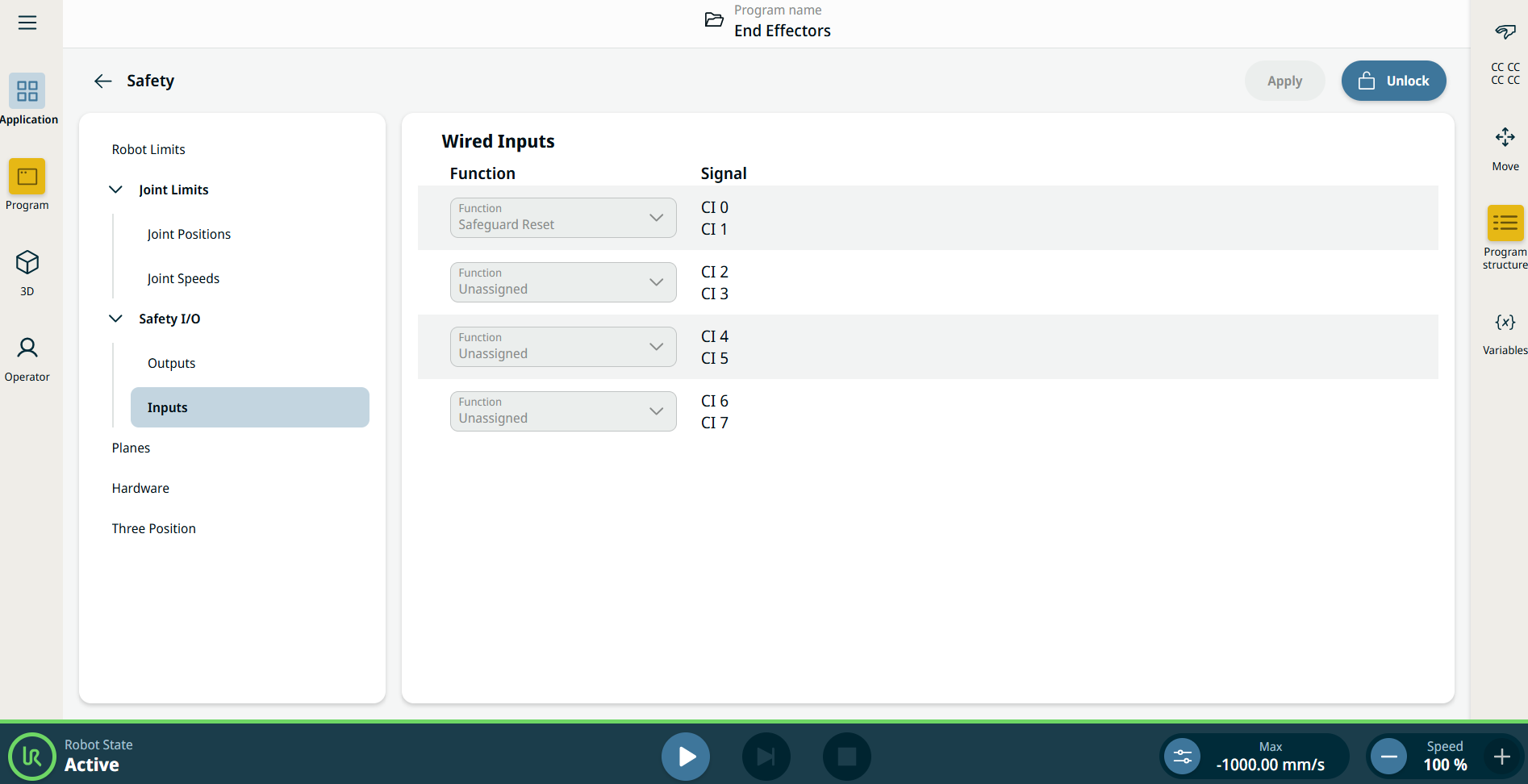
| 控制箱 輸入 |
輸入的說明如下表:
預設防護重設停用後,當防護不再觸發停止時,就會自動重設。 如果一個人通過防護區域,則可能會發生這種情況。 如果防護設備未偵測到人員,且人員暴露於危險之中,依標準情況將停止自動重設。
啟用自動模式防護停止時,在手動模式下不會觸發防護停止。
|
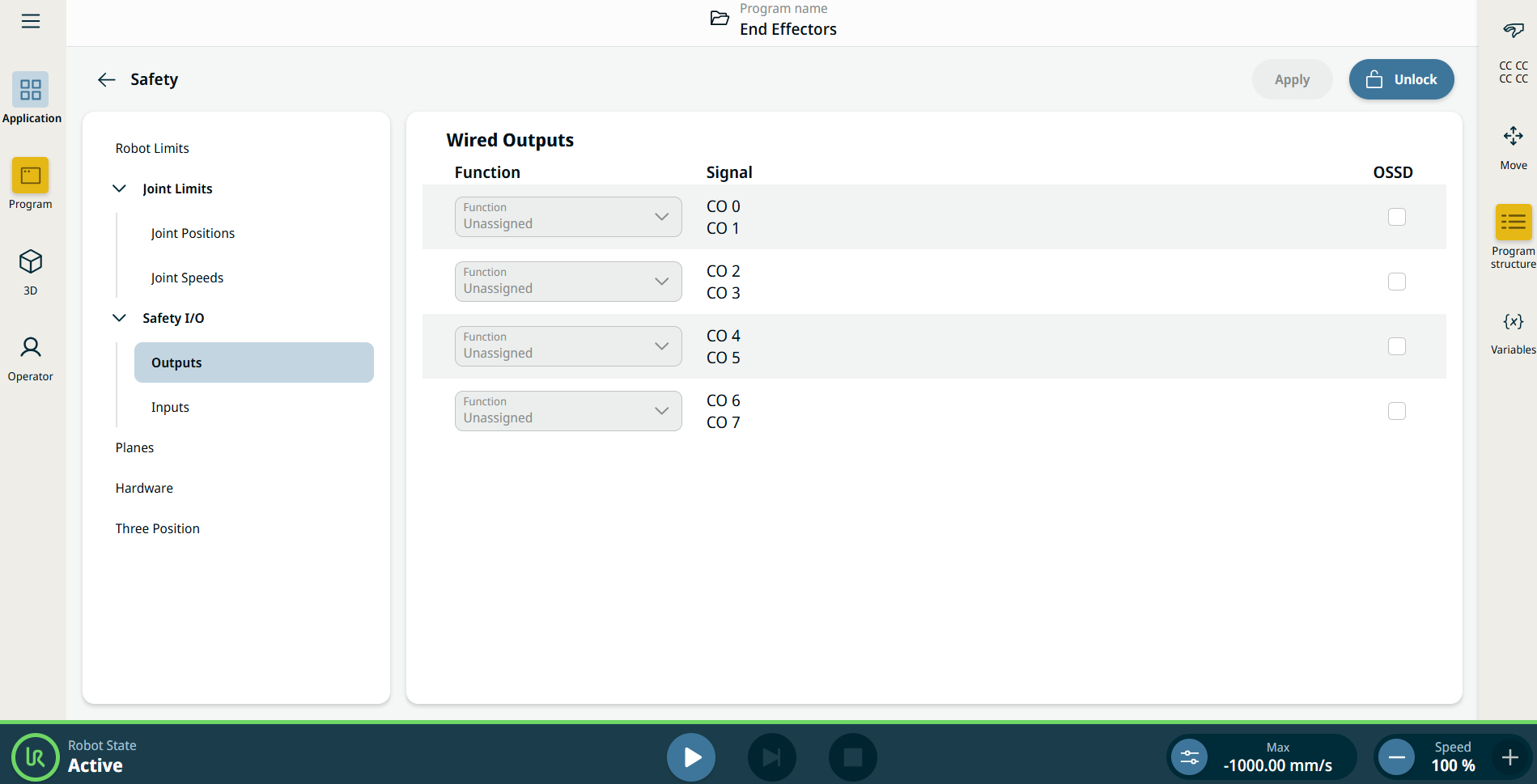
| 控制箱輸出 |
若發生安全系統違規或故障,則所有安全輸出都會變低。 意即即使未觸發緊急停止,系統停止輸出也會啟動停止。 您可以使用下列安全功能輸出訊號。 觸發高電平訊號的狀態結束後,所有訊號回復為低電平:
從機器人通過系統停止輸出獲得緊急停止狀態的外部機器必須符合 ISO 13850 標準。 在机器人紧急停止输入连接到外部紧急停止设备的设置中,这一点尤其必要。 在這種情況下,當外部緊急停止裝置被釋放時,系統停止輸出將變為高。 这意味着外部机械的紧急停止状态将被重置,而无需机器人操作员进行手动操作。 因此,为了符合安全标准,外部机械必须需要手动操作才能恢复。
|