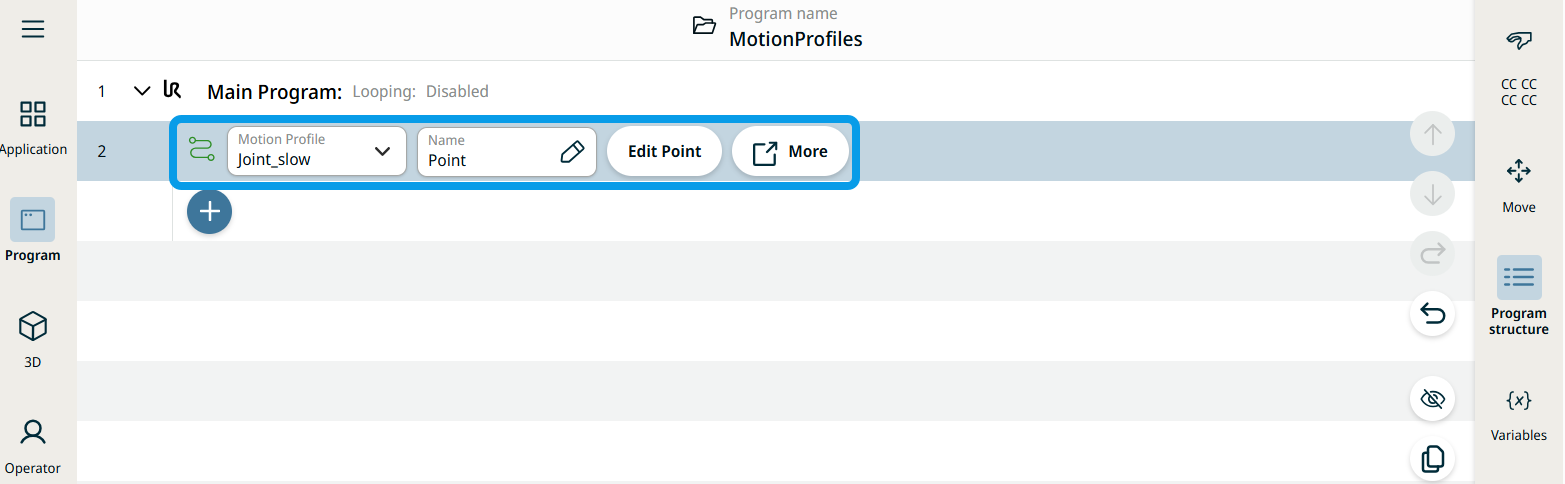
Joint Move
| 說明 |
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. 該移動路徑可能不是 A 和 B 之間的直線,但是對關節的開始位置和關節的結束位置而言是最佳的。 Joint Move makes movements that are calculated in the robot arm joint space. 控制關節同時完成其移動。 此移動類型將為工具沿著一個曲線路徑前進。
|
|
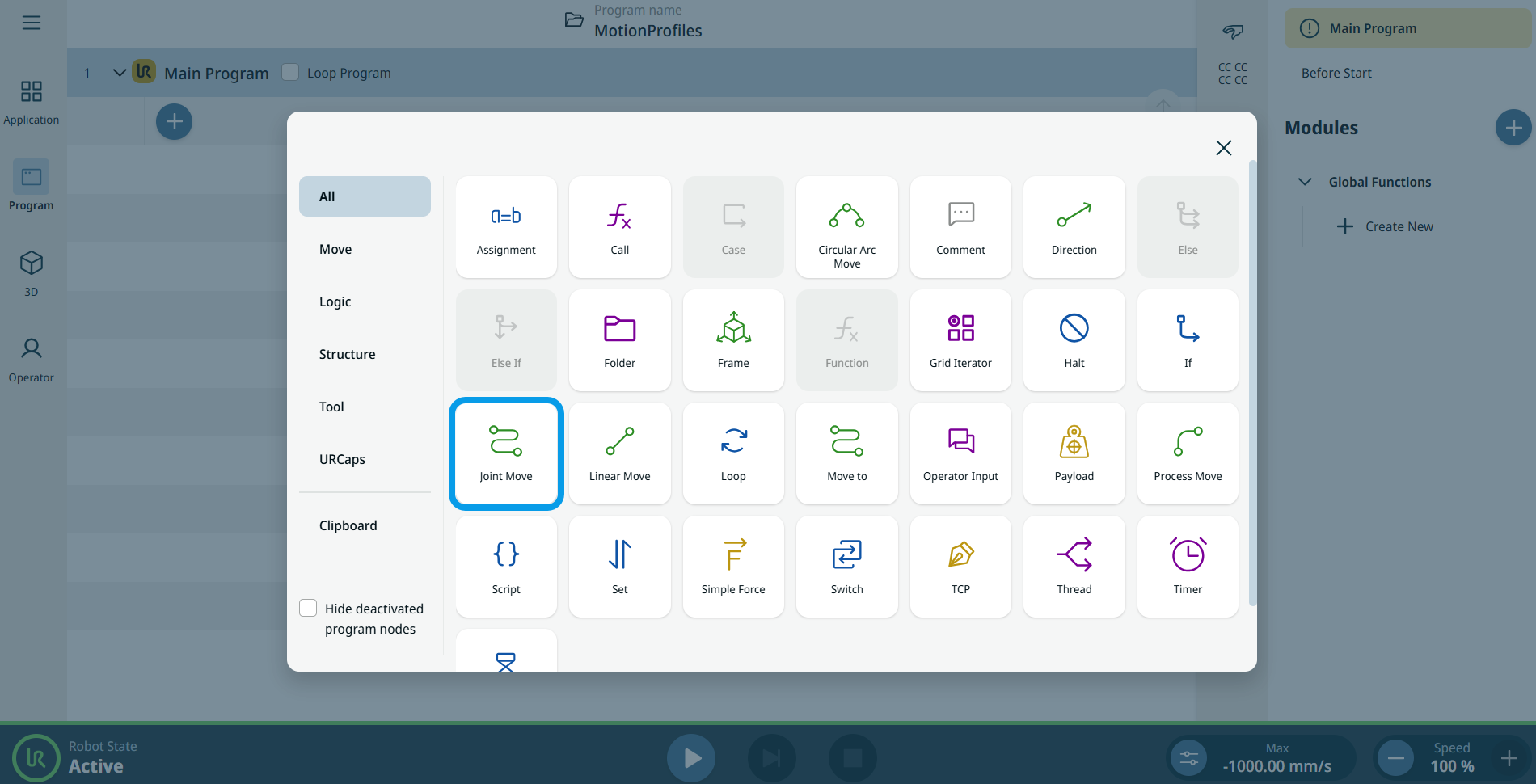
To access Joint Move command |
|
|
|
|
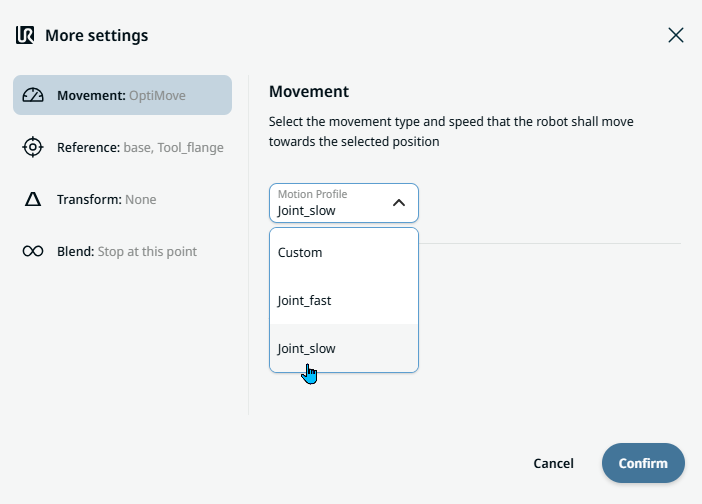
| Movement setting |
|
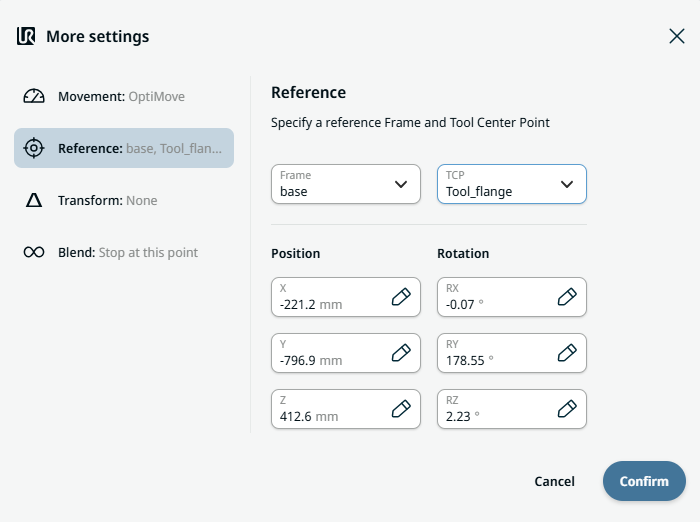
| Reference setting |
|
| Transform setting |
|
|
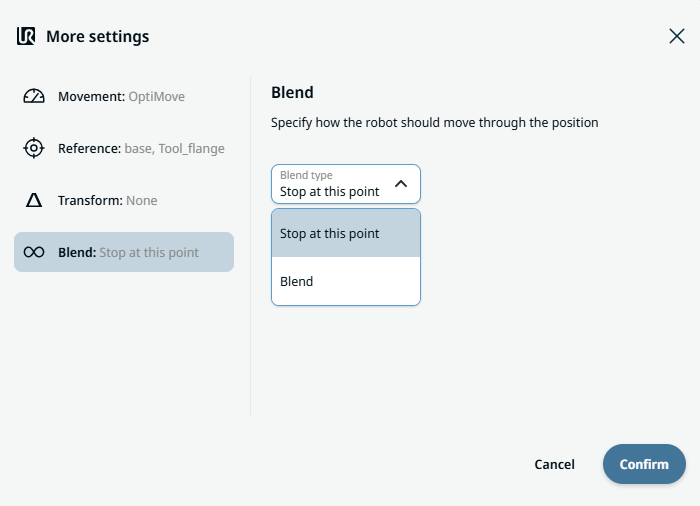
Blend setting |
|