设置固定路点
| 描述 |
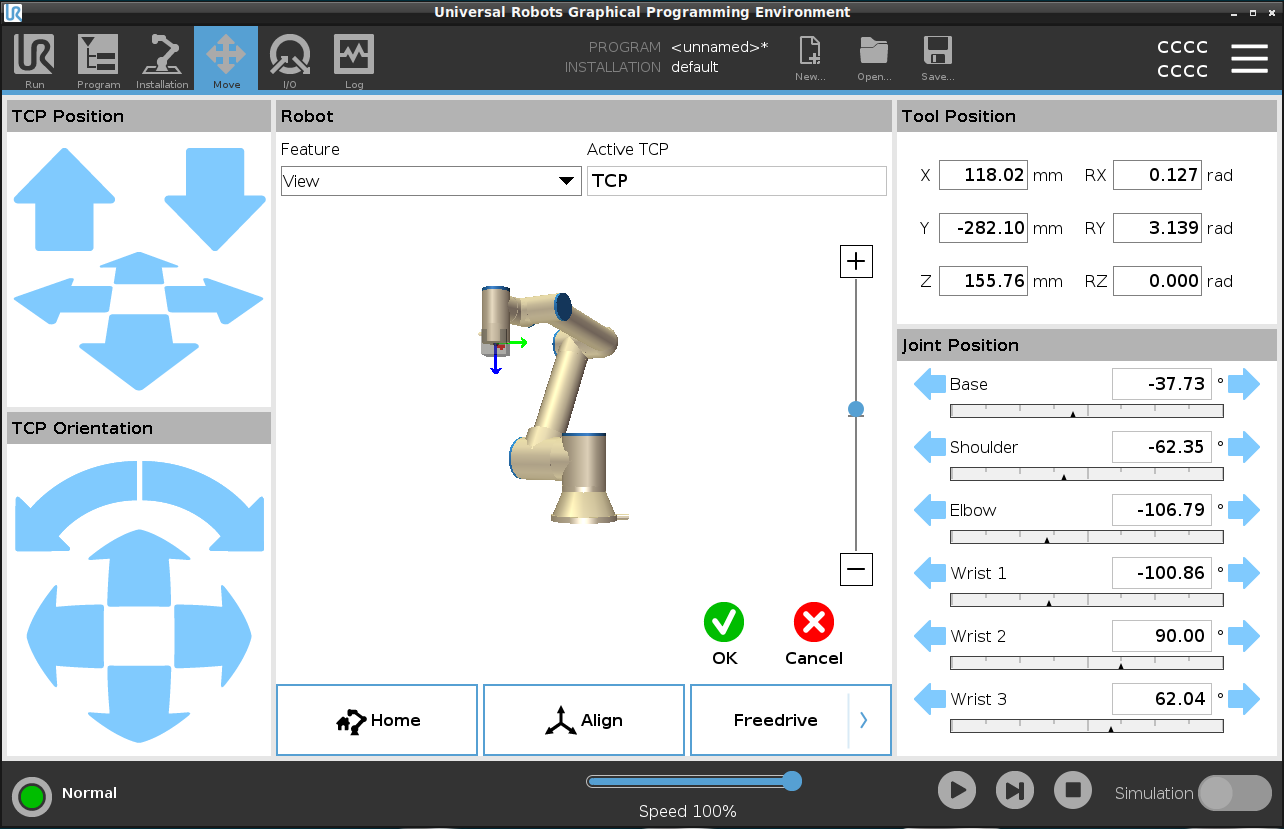
设置固定路点是指将机械臂移动到要设置的特定路点位置。 然后,在机器人程序中将路点“设置”为机械臂整体移动路径中的一个位置。
您可以使用自由驱动模式,也可以使用“移动”选项卡中的手动控件移动机械臂。 请参阅:移动
|
|
设置固定路点 |
向机器人程序中添加固定路点 |
|
|
如何移动机械臂来设置路点在很大程度上取决于您的机器人程序、您正在创建的应用、TCP 配置,等等。 设置路点没有最佳方式。
|