等待
| 描述 |
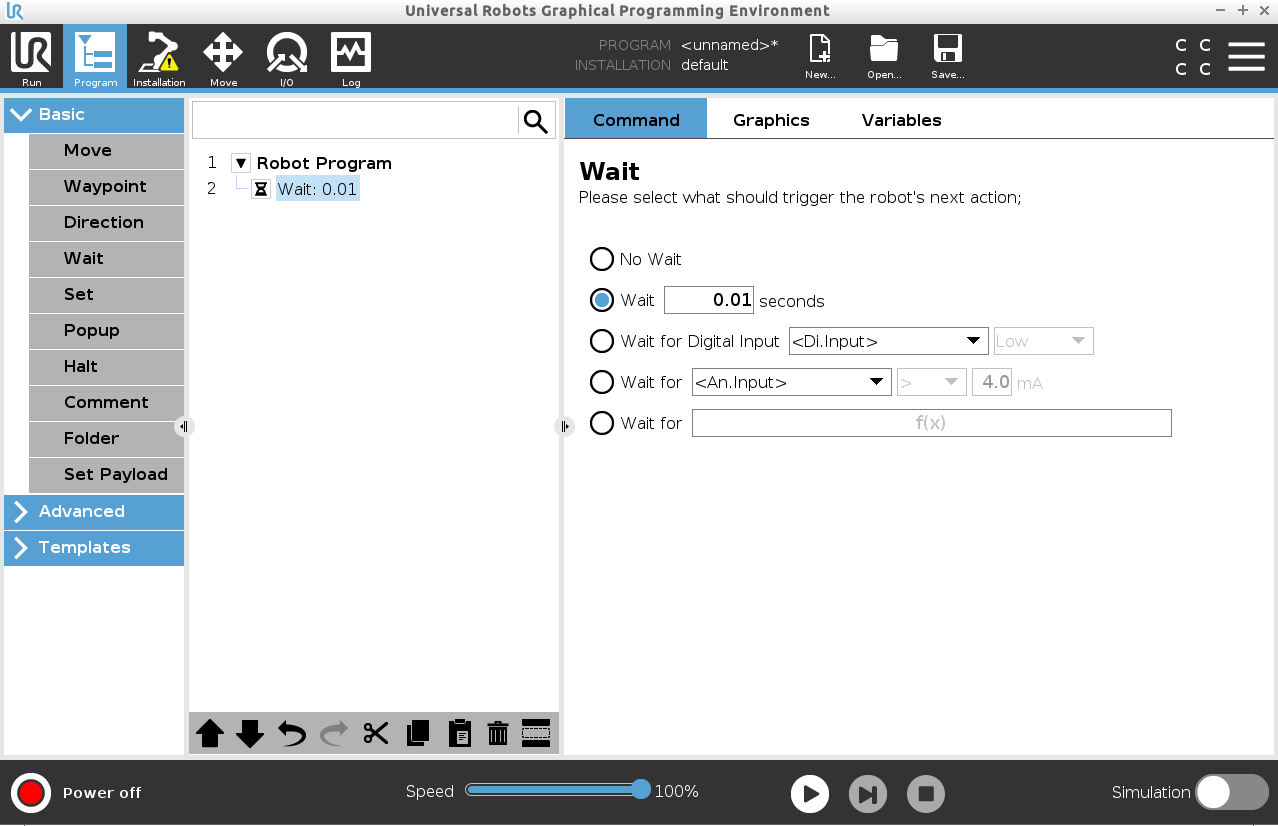
“等待”命令可对机器人行为进行附加控制。 当程序中引入新的输入时,“等待”命令会暂停机器人的移动。
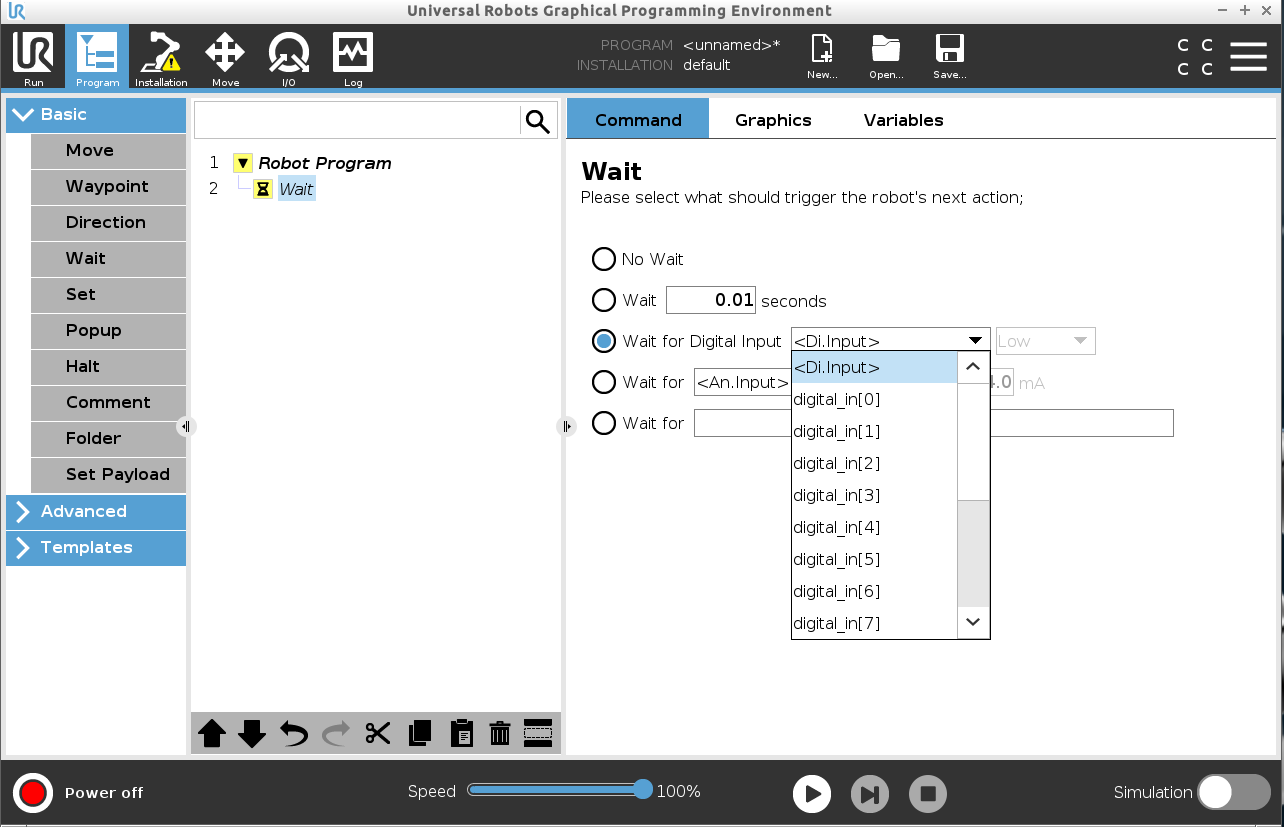
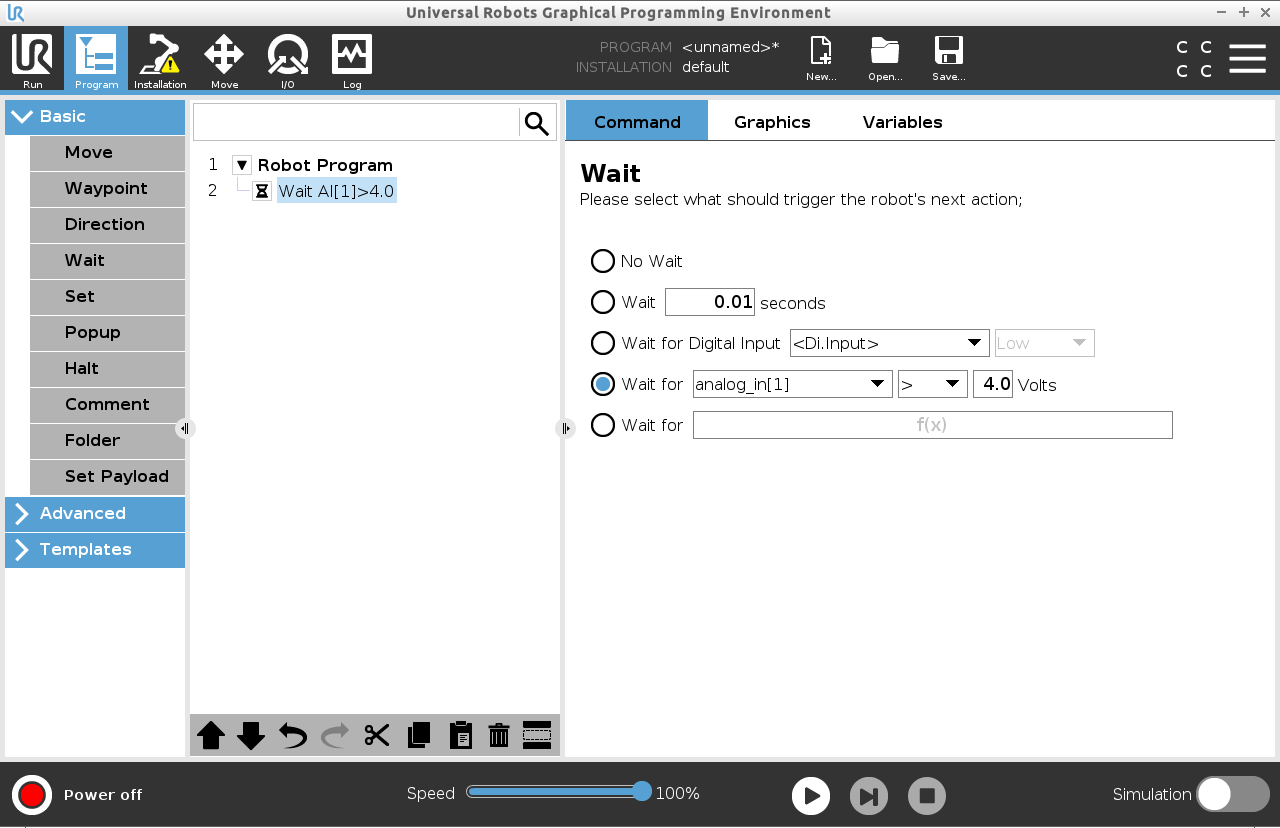
您可以将“等待”命令添加到带有外部传感器的程序中,使机器人在程序继续之前等待其中一个传感器激活。
当您将“等待”添加到程序树时,“等待”窗格将出现在屏幕右侧。
请参阅以下有关使用“等待”的章节:
|
| 向机器人程序中添加“不等待” |
“不等待”允许机器人在继续运行程序之前不执行任何操作。 在新输入之前没有暂停。 |
|
|
在编写机器人程序时,可以使用“不等待”命令作为临时占位符。
|