通过清除这些区域中的障碍物、以不同的方式放置机器人,或将安全平面与关节限值结合使用等措施,防止机器人移动到工作区的这一区域,可以规避规避夹伤风险。
将机器人放置在某些区域可能会造成夹伤危险,从而导致受伤。
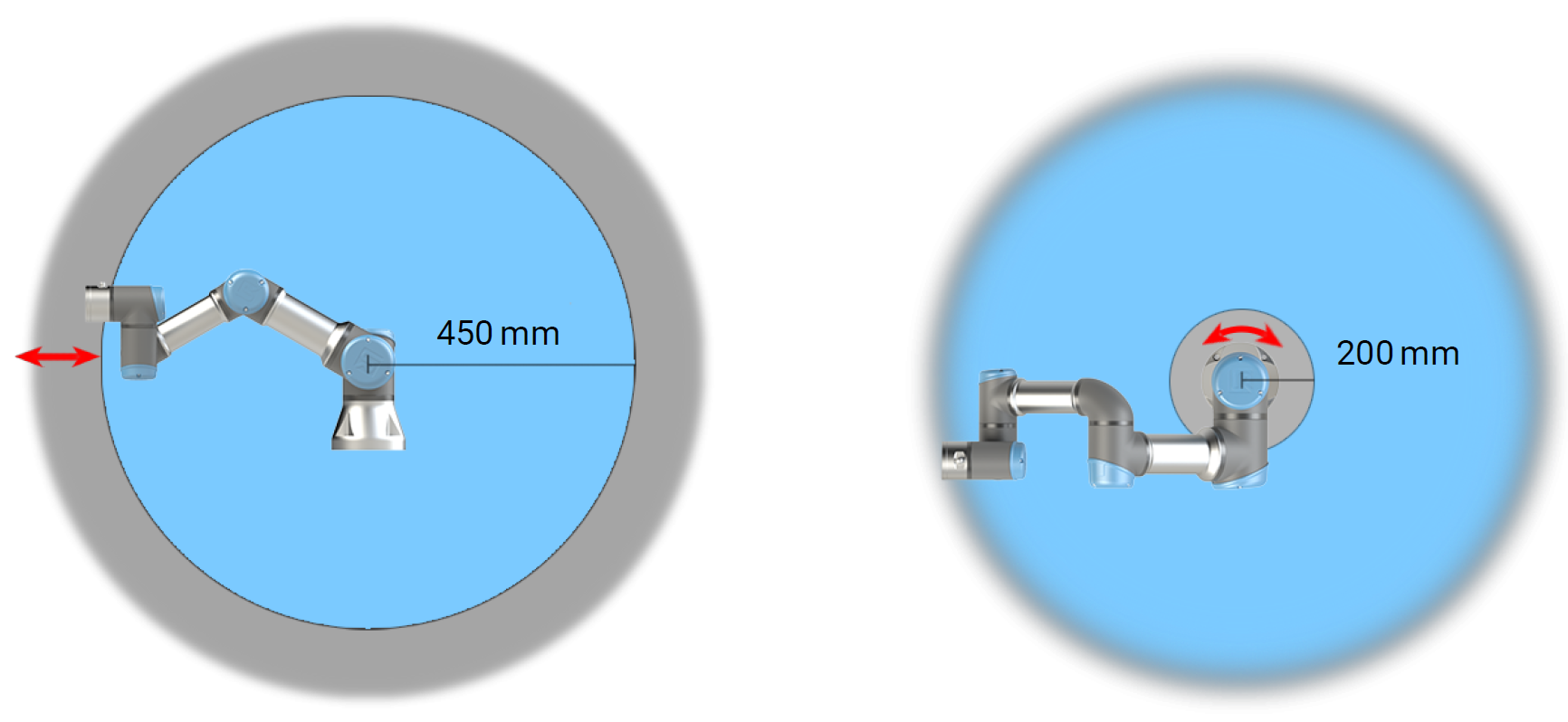
由于机械臂的物理特性,某些工作区需要注意夹伤危险。 其中一个区域(左)是定义的径向运动区域,即手腕 1 关节与机器人基座至少相距 450 mm 的区域。 另一个区域(右)是在机器人基座 200 mm 范围内的区域(机器人按正切方向移动时)。