安全 I/O
| 表
|
功能差异如下所示。
|
| 安全注意事项
|
使用可配置的 I/O 设置紧急停止输出等其他安全 I/O 功能。 使用 PolyScope 界面定义安全功能的一组可配置 I/O。 不定期检验和测试安全功能可能会导致危险情况。
|
| OSSD 信号 |
过滤所有配置和永久安全输入,以允许使用脉冲长度小于3ms的OSSD安全设备。 安全输入每毫秒采样一次,输入状态由最近7毫秒内最常见的输入信号决定。
|

| 默认安全配置 |
交付的机器人采用默认配置,可以在没有任何附加安全设备的情况下进行操作。
|
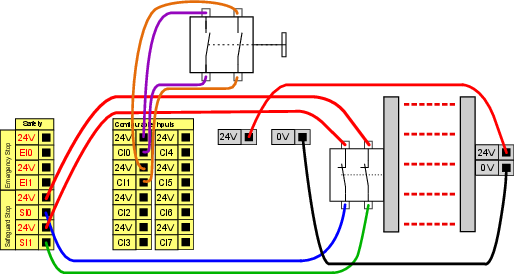
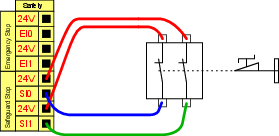
| 连接紧急停止按钮 |
大多数应用需要使用一个或多个额外的紧急停止按钮。 下图显示了如何连接一个或多个紧急停止按钮。
|
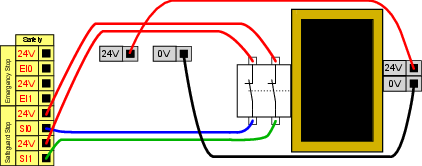
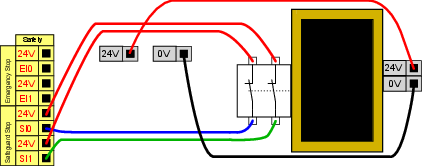
| 可自动恢复的防护停止 |
此配置仅针对操作员不能通过门并在身后关上门的应用。 可配置的 I/O 用于设置门外的重置按钮,以重新激活机器人运动。 当重建信号时,机器人自动恢复运动。 如果可从安全地带内部重建信号,请勿使用此配置。
|
|
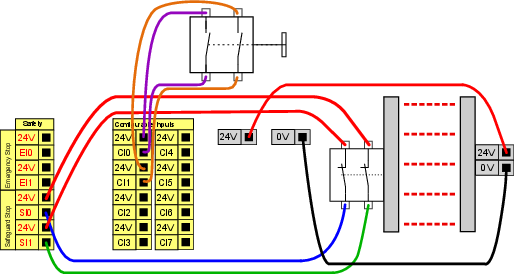
带重置按钮的防护停止 |
如果使用防护接口与光幕交互,需要从安全地带外部进行重置。 重置按钮必须为双通道型按钮。 在本例中,配置用于复位的 I/O 是 CI0-CI1。
|