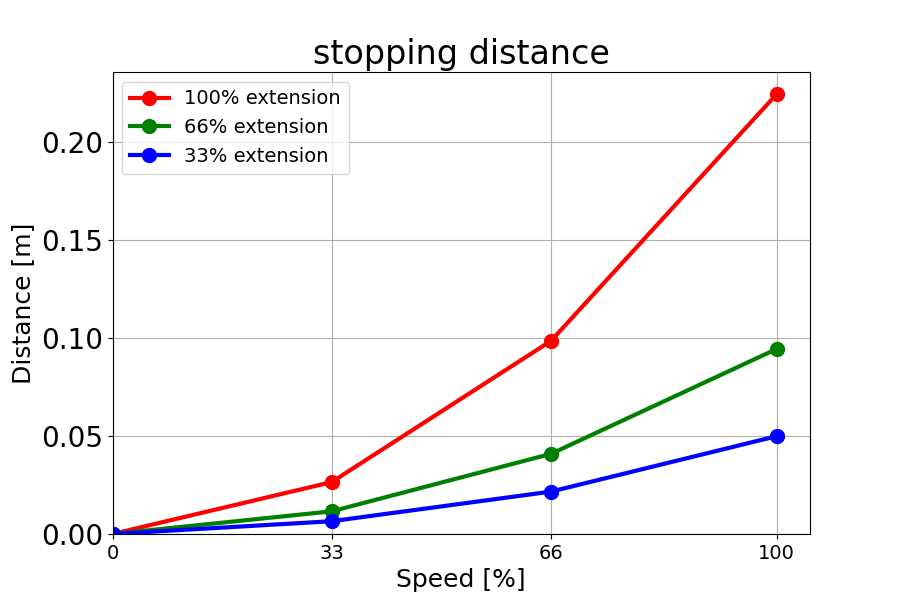
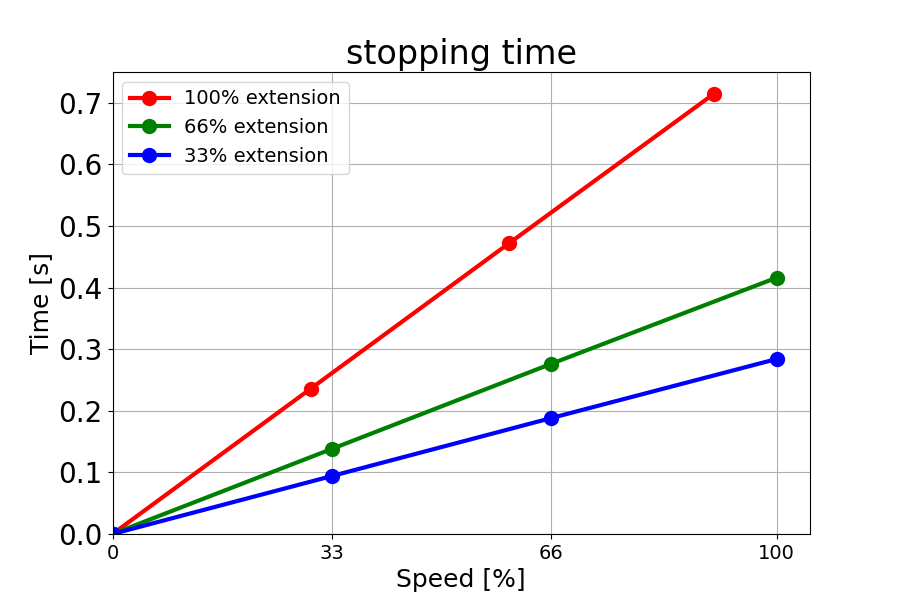
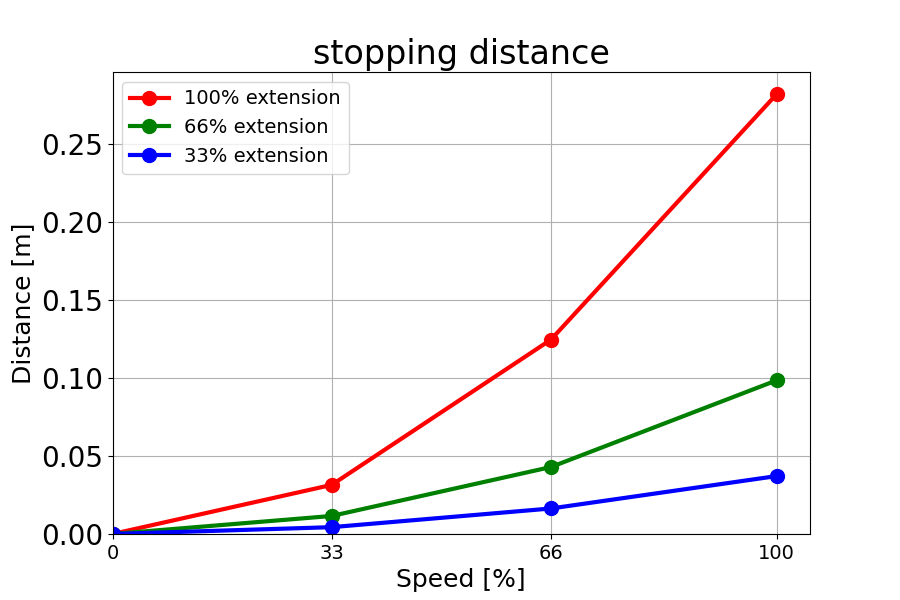
制动时间和制动距离
| 关节 0(基座)
负载为 18 kg 的 33% 时的停止距离(米)。 |
|
|
负载为 18 kg 的 66% 时的停止距离(米)。
|
|
|
负载为最大有效载荷 18 kg 时的停止距离(米)
|
|
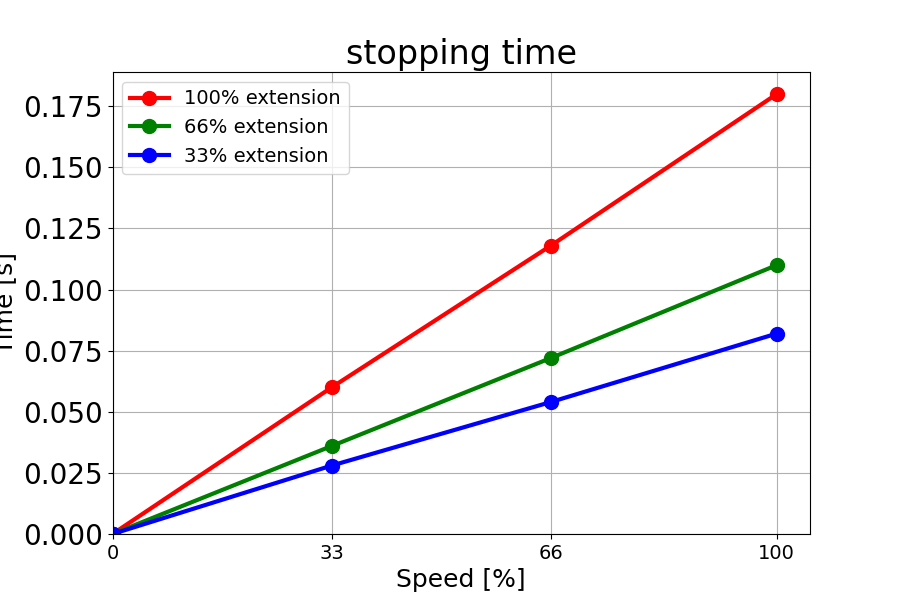
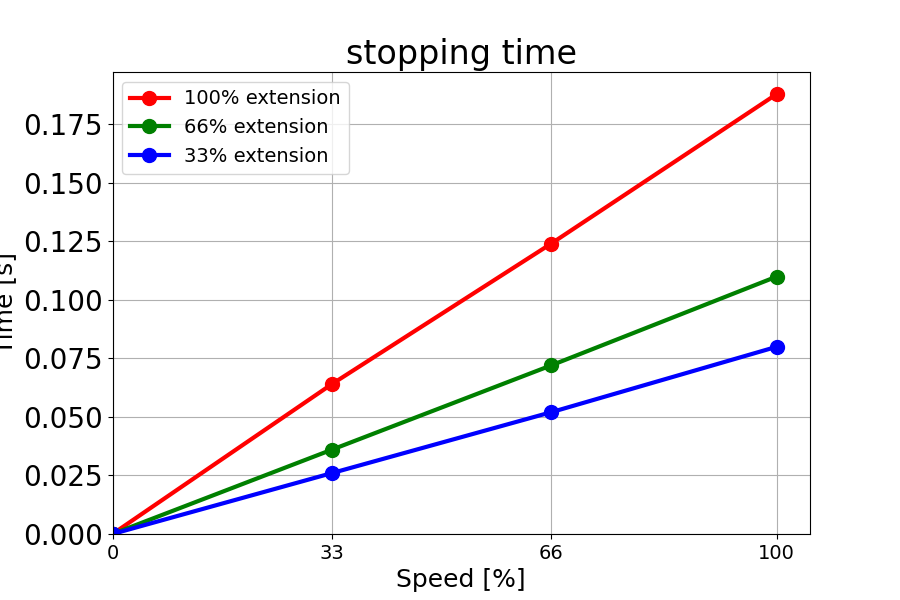
| 关节 0(基座)
负载为 18 kg 的 33% 时的停止时间(秒)。 |
|

|
负载为 18 kg 的 66% 时的停止时间(秒)。
|
|
|
负载为最大有效载荷 18 kg 时的停止时间(秒)。
|
|
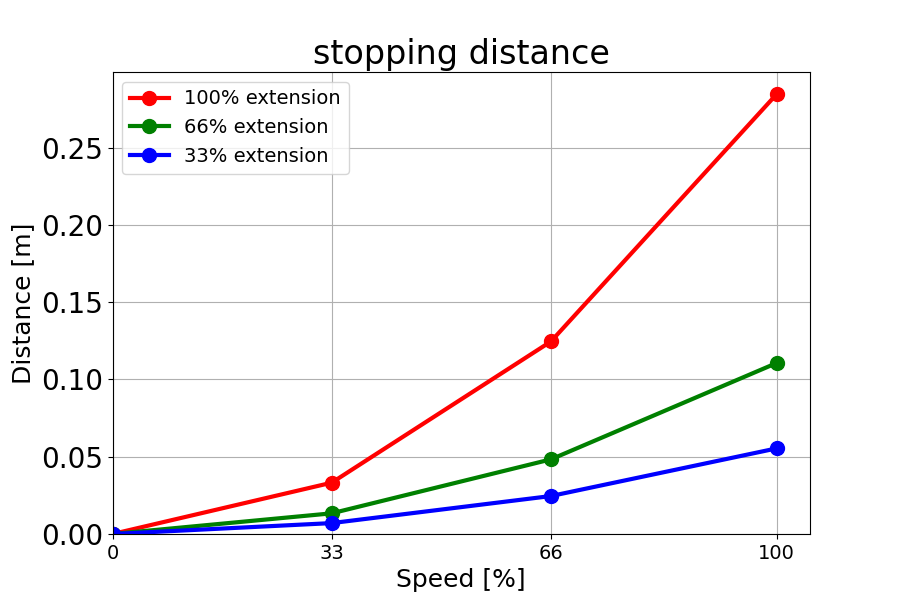
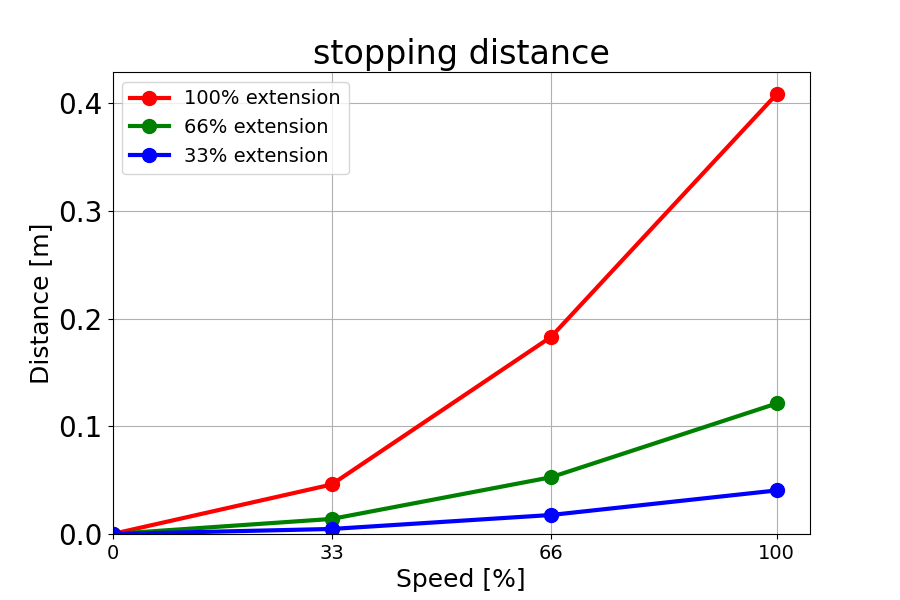
| 关节 1(肩部)
负载为 18 kg 的 33% 时的停止距离(米)。
|
|
|
负载为 18 kg 的 66% 时的停止距离(米)
|
|
|
负载为最大有效载荷 18 kg 时的停止距离(米)
|
|
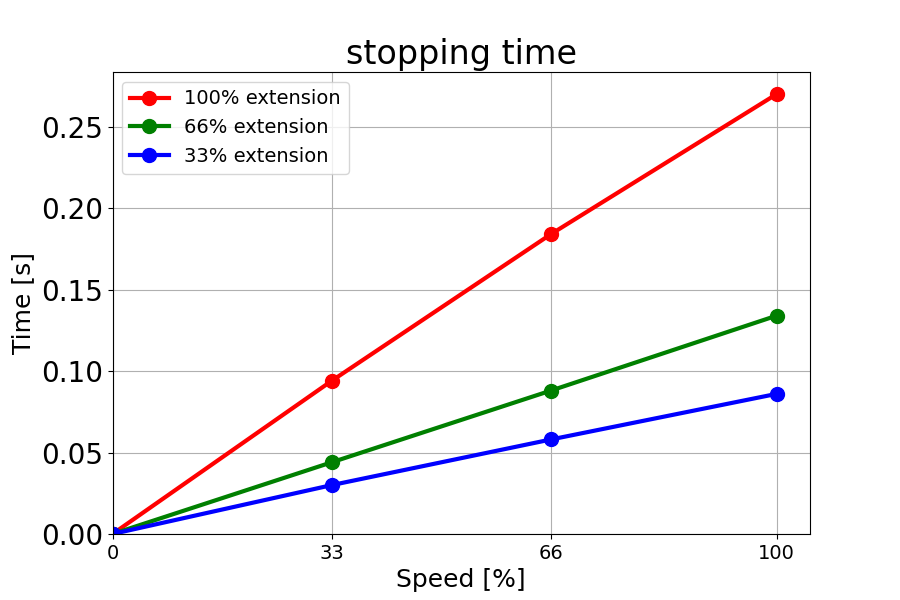
| 关节 1(肩部)
负载为 18 kg 的 33% 时的停止时间(秒) |
|
|
负载为 18 kg 的 66% 时的停止时间(秒)
|
|
|
负载为最大有效载荷 18 kg 时的停止时间(秒)。
|
|
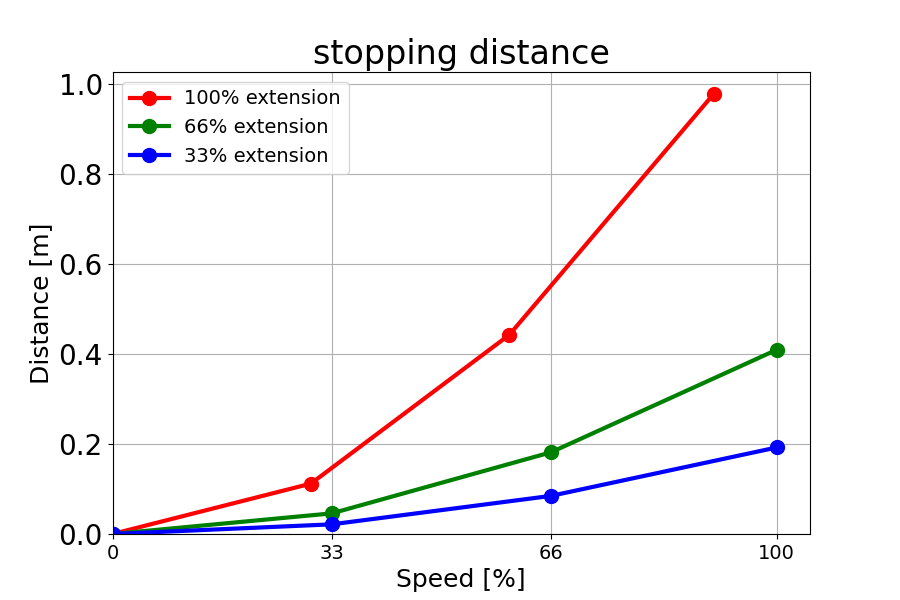
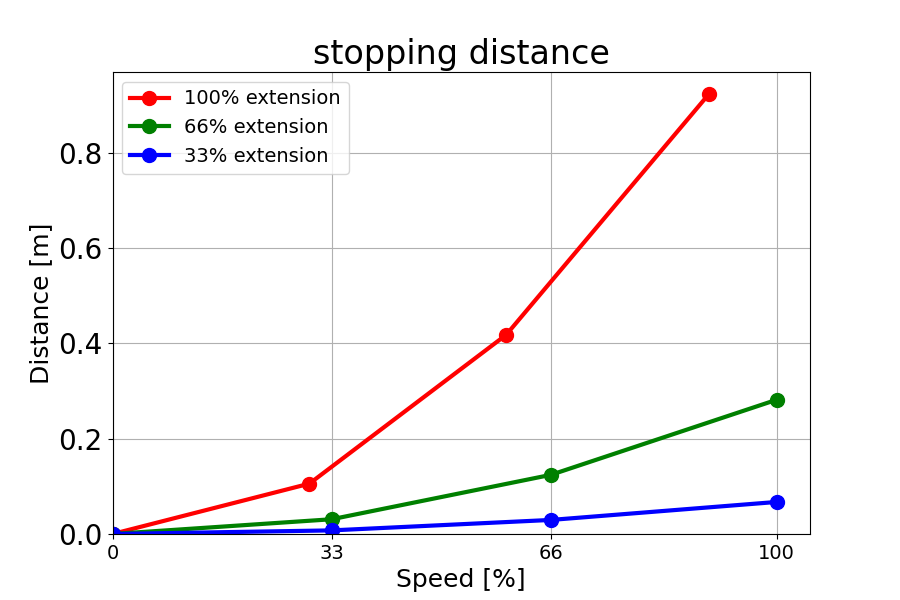
| 关节 2(肘部)
负载为 18 kg 的 33% 时的停止距离(米)。 |
|

|
负载为 18 kg 的 66% 时的停止距离(米)
|
|

|
负载为最大有效载荷 18 kg 时的停止距离(米)
|
|

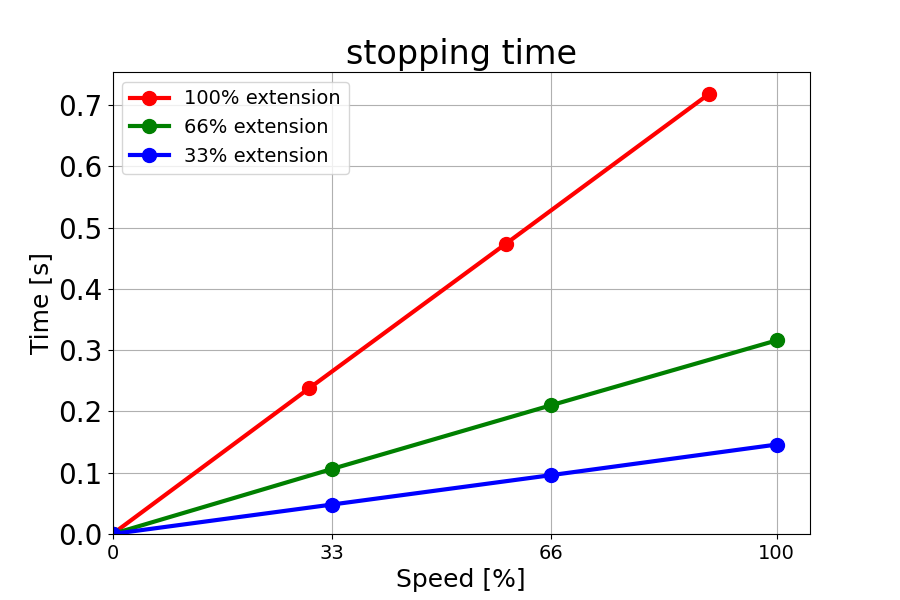
| 关节 2(肘部)
负载为 18 kg 的 33% 时的停止时间(秒) |
|

|
负载为 18 kg 的 66% 时的停止时间(秒)
|
|

|
负载为最大有效载荷 18 kg 时的停止时间(秒)
|
|
