位姿编辑器
| 描述 |
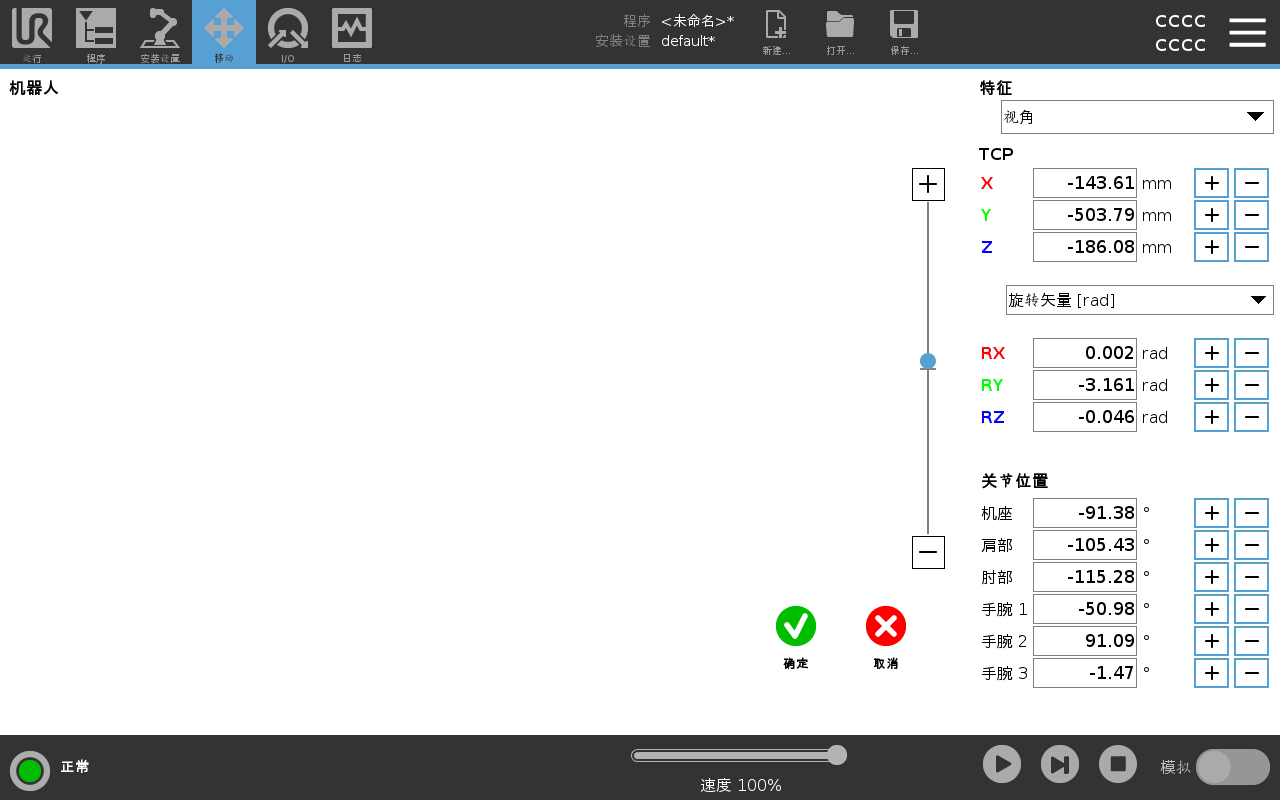
访问 Pose Editor 屏幕后,您可以精确配置TCP的目标关节位置或目标姿势(位置和方向)。 注意:此屏幕为 离线 ,不直接控制机械臂。
|
| 联合立场 |
直接指定单个关节位置。 每个关节位置的关节限值范围为 − 360恤 至 + 360恤。 您可以按以下方式配置关节位置:
|
| “确定”按钮 |
如果您从移动屏幕激活此屏幕,则点按确定按钮返回到移动屏幕。 机械臂移动到指定目标。 如果最后指定的值是工具坐标,则机械臂使用移动类型 MoveL 移动到目标位置;或者如果最后指定的是关节位置,则使用移动类型 MoveJ。
|
| 取消按钮 |
取消 按钮退出屏幕,丢弃所有更改。
|