有效载荷
| 描述 |
您必须设置有效载荷、CoG 和惯量,才能使机器人发挥最佳性能。 您可以定义多个有效载荷,并在程序中切换。 这在“抓取和放置”应用中十分有用,在这种应用中,机器人会抓取和释放物体。
|

| 添加、重命名、修改和移除有效载荷 |
您可以通过以下操作开始配置新的有效载荷:
|
 可使用唯一名称定义新的有效载荷。 新的有效载荷显示在下拉菜单中。
可使用唯一名称定义新的有效载荷。 新的有效载荷显示在下拉菜单中。 可重命名有效载荷。
可重命名有效载荷。 可移除所选有效载荷。 不能移除最后一个有效载荷。
可移除所选有效载荷。 不能移除最后一个有效载荷。| 激活的有效载荷 |
下拉菜单中的复选标记指示哪个有效载荷是激活的 |
 。
可以使用
。
可以使用 更改激活的有效载荷。
更改激活的有效载荷。
| 默认有效载荷 |
在程序启动之前,将默认有效载荷设置为激活的有效载荷。
下拉菜单中的绿色图标指示默认配置的有效载荷
|
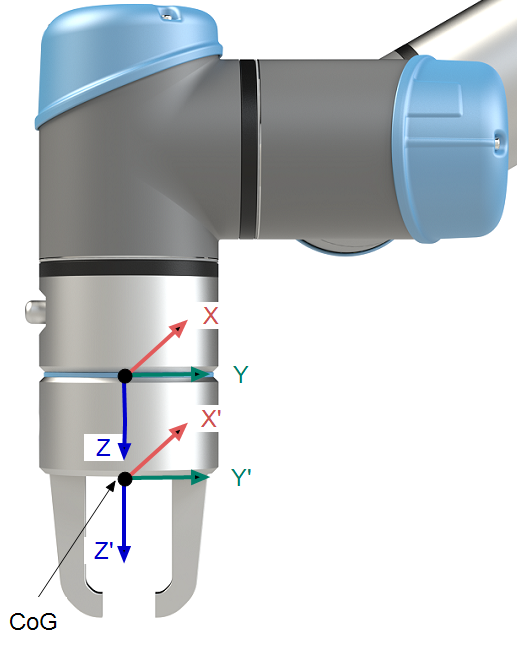
| 设置重心 |
点按字段 |
| 有效载荷估计 |
此功能允许机器人帮助设置正确的有效载荷和重心 (CoG)。
|
| 设置惯量值 |
可以选择使用自定义惯量矩阵来设置惯量值。 点按字段: 惯量是在坐标系中指定的,其原点位于有效载荷的重心 (CoG) 处,且轴与工具法兰轴对齐。 可根据具有用户指定质量的球的惯量计算默认惯量,球的质量密度为 1g/cm3
|