使用“移动”选项卡
| 描述 |
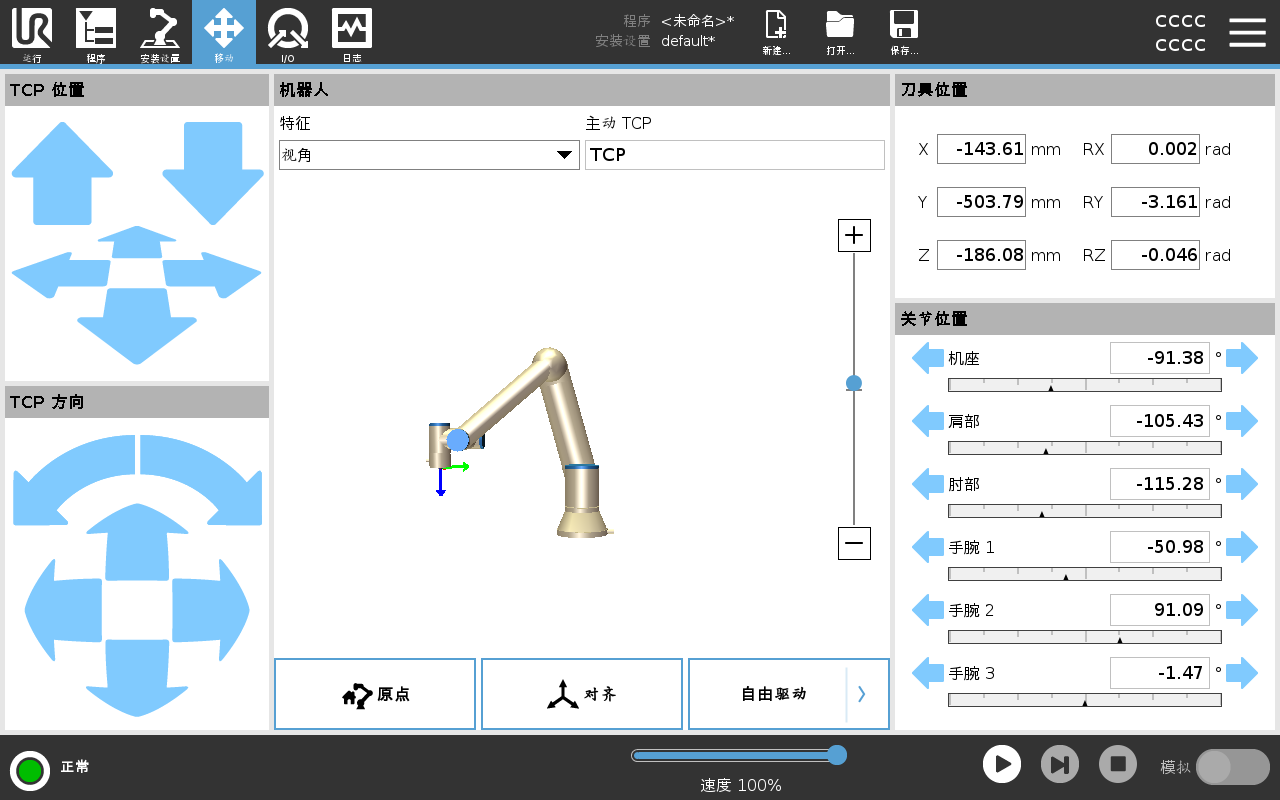
使用“移动”选项卡屏幕,可以通过平移/旋转机器人工具或单独移动机器人关节来直接移动(缓慢移动)机械臂。
|
| 使用“移动工具”箭头 |
|
| 功能 |
在特征下,您可以定义如何相对于视图、基座或工具特征控制机械臂。 为了获得控制机械臂的最佳感觉,您可以选择 视图 功能,然后使用 个旋转箭头 来更改3D图像的视角,以匹配真实机械臂的视图。
|
| 主动 TCP |
在机器人字段中激活的 TCP 下,会显示当前激活的工具中心点 (TCP) 的名称。
|
| 回零 |
回零按钮可以访问将机器人移动就位屏幕,您可以在其中按住自动按钮,将机器人移动到先前在“安装设置”下定义的位置。 “回零”按钮的默认设置会将机械臂返回直立位置。
|
| 自由驱动 |
|
| 对齐 |
|
| 工具位置 |
文本框显示TCP相对于所选特征的完整坐标值。 您可以配置多个命名的 TCP。 还可以点按编辑位姿来访问位姿编辑器屏幕。
|
| 关节位置 |
关节位置 字段允许您直接控制单个关节。 每个关节沿着由水平条定义的默认关节极限范围从 − 360 到 + 360移动。 一旦达到极限,您就不能再移动关节了。 可以将关节配置为不同于默认值的位置范围,这个新范围在水平条内以红色区域标出。
|
| 使用“移动”选项卡中的“自由驱动” |
只有经过风险评估后允许使用时,才能在应用中使用自由驱动按钮。 使用自由驱动按钮时,如果未能正确配置安装设置,可能会导致机械臂发生不必要的移动。
如果未能正确配置安装设置,在自由驱动过程中可能会增加因有效载荷错误而导致机械臂掉落的风险。
|