工具位置限制
| 描述 |
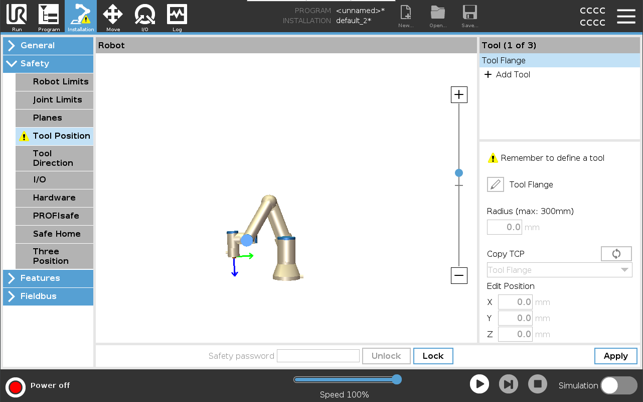
“工具位置”屏幕可对放置在机械臂末端的工具和/或附件进行更多受控的限制。
在Copy TCP (复制TCP )下,您还可以选择 Tool Flange (工具法兰1 ) ,并使工具值返回到0。 默认球体在工具法兰上定义。
|

| 工具位置警告 |
您必须在安全设置中设置工具位置,以便在工具 TCP 接近安全平面时正确触发安全平面。 如果出现以下情况,“工具位置”上会一直显示警告:
配置工具位置
|
| 工具位置警告示例 |
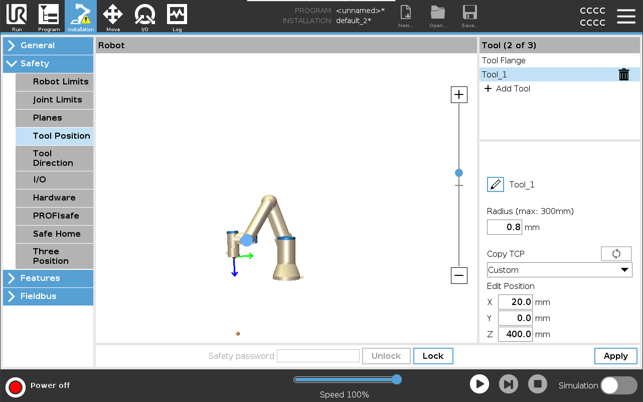
在此示例中,半径设置为 0.8mm,TCP 位置分别设置为 XYZ [20, 0, 400](单位为毫米)。 如果已经在“->常规/TCP”设置中进行了设置,您可以选择使用下拉菜单“复制 TCP”。 点按屏幕右下角的“应用”后,您就完成了。
“工具位置”按钮上的警告表示“工具法兰”下未添加工具。
“工具位置”按钮上没有警告提示则表示添加了工具(非工具法兰)
|