奇点
| 描述 |
奇点是限制机器人运动和定位能力的位姿。 当机械臂接近和离开奇点时,机械臂可能会停止移动或非常突然地快速移动。 将机器人放置在工作空间中和定义操作空间时,务必必须考虑下文详述的奇点位置。 确保机器人在奇点附近运动时不会对机械臂、末端执行器和工件范围内的任何人造成危险。
以下原因会导致机械臂出现奇点:
|
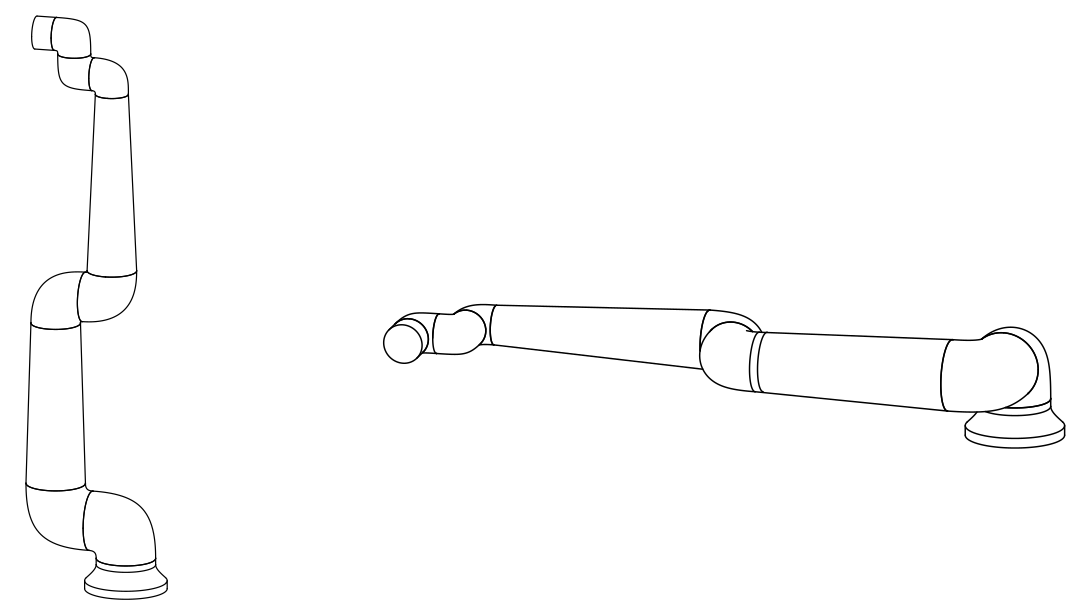
| 外部工作空间限值
|
该奇点的发生原因是机器人无法到达足够远的地方或超出了最大工作区域。
为了避免这种情况:将设备放置在机器人周围,以免机器人超出建议的工作空间。
|
| 内部工作空间限值
|
该奇点的发生原因是运动的发生位置在机器人基座的正上方或正下方。 这会导致许多位置/方向无法到达。
为了避免这种情况:对机器人任务进行编程,使其不必在中轴内或附近工作。 您还可以考虑将机器人基座安装在水平表面上,将中轴从垂直方向旋转到水平方向,从而使其远离任务的关键区域。
|
| 手腕对齐
|
该奇点的发生原因是腕关节 2 与肩部、肘部和腕关节 1 在同一平面上旋转。 这限制了机械臂的运动范围,无论工作空间如何。
为了避免这种情况:布置机器人任务,使其不必以这种方式对齐机器人腕关节。 您还可以偏移工具的方向,以便工具可以指向水平方向,而不会出现手腕对齐问题。
|