软件安全限值
| 安全平面模式 |








| 配置安全平面 |
|
| 复制特性 |
在 Copy Feature中,只有Undefined和Base可用。 您可以通过选择 未定义来重置配置的安全平面 如果在“功能”屏幕中修改了复制的功能,则“复制功能”文本右侧会出现一个警告图标。 这表明功能不同步,即属性卡中的信息未更新以反映可能对功能进行的修改。
|

| 颜色代码 |
|

| 肘部限制 |
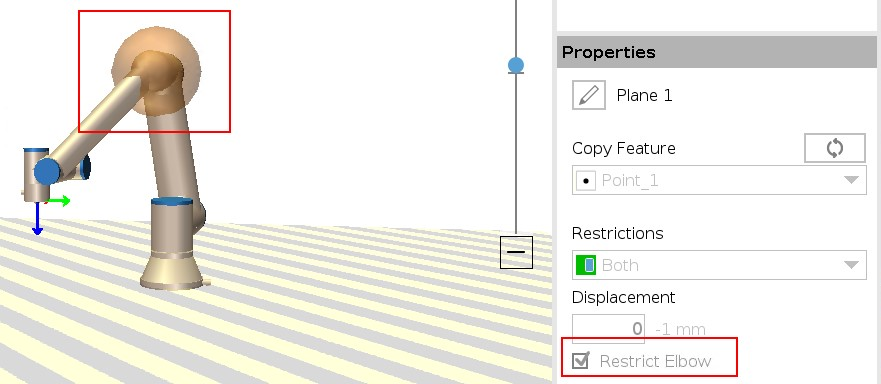
您可以启用 限制肘部 ,以防止机器人肘关节穿过您定义的任何平面。 禁用限制肘部,以使肘部穿过平面。 限制肘部的球的直径因机器人尺寸而异。
有关特定半径的信息可以在机器人的 urcontrol.conf 文件的 [肘部] 部分下找到。
|
| 工具法兰限制 |
限制工具法兰可以防止工具法兰和连接的工具穿过安全平面。 当您限制工具法兰时,非限制区域是安全平面内的区域,在该区域内工具法兰可以正常操作。 工具法兰不能越过安全平面外的限制区域。
移除限制后,工具法兰将可以超出安全平面,到达受限区域,而连接的工具仍位于安全平面内。
使用较大的工具偏移时,可以移除工具法兰限制。 这样可以让工具移动更远的距离。
限制工具法兰需要创建平面特征。 平面特征用于稍后在安全设置中设置安全平面。
|
| 添加平面特征示例 |
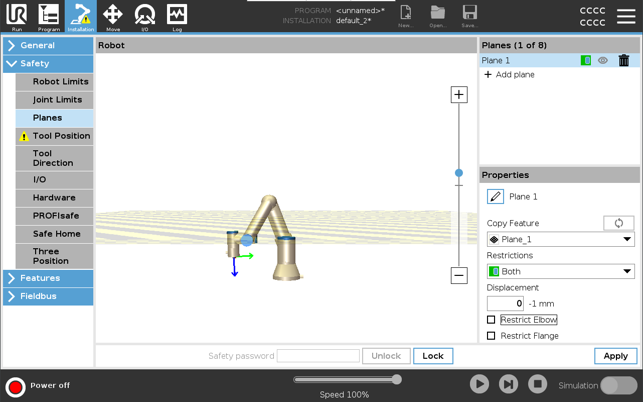
位移将沿平面法线(平面特征的 Z 轴)向正方向或负方向偏移平面。 取消选中表示“肘部”和“工具法兰”的复选框,以免它们触发安全平面。 也可根据应用的需要选中“肘部”。
不受限制的工具法兰可以穿过安全平面,即使没有定义工具也是如此。 如果未添加任何工具,“工具位置”按钮上的警告会提示您正确定义工具。 使用不受限制的工具法兰和定义的工具时,请确保工具的危险部分不会超过和/或超出特定区域。 不受限制的工具法兰可用于需要安全平面的任何应用场景,例如焊接或装配。
|
| 工具法兰限制示例 |
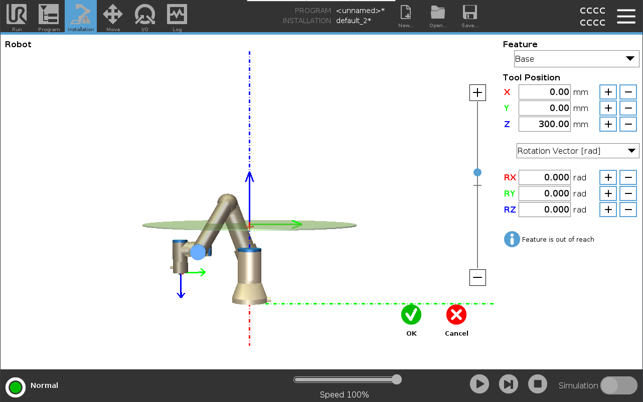
在本例中,沿正 Z 轴相对于基座特征偏移 300mm 创建了 X-Y 平面。 可以将平面的 Z 轴视为“指向”限制区域。 如果桌子表面等物体需要安全平面,可以将平面围绕 X 轴或 Y 轴旋转 3.142 弧度或 180°,以便限制区域位于桌子下方。 (提示:将旋转显示从“旋转矢量 [rad]”更改为“RPY [°]”)
如果需要,可以稍后在安全设置中向正或负 Z 方向上偏移平面。 当对平面的位置感到满意时,点按“确定”。
|