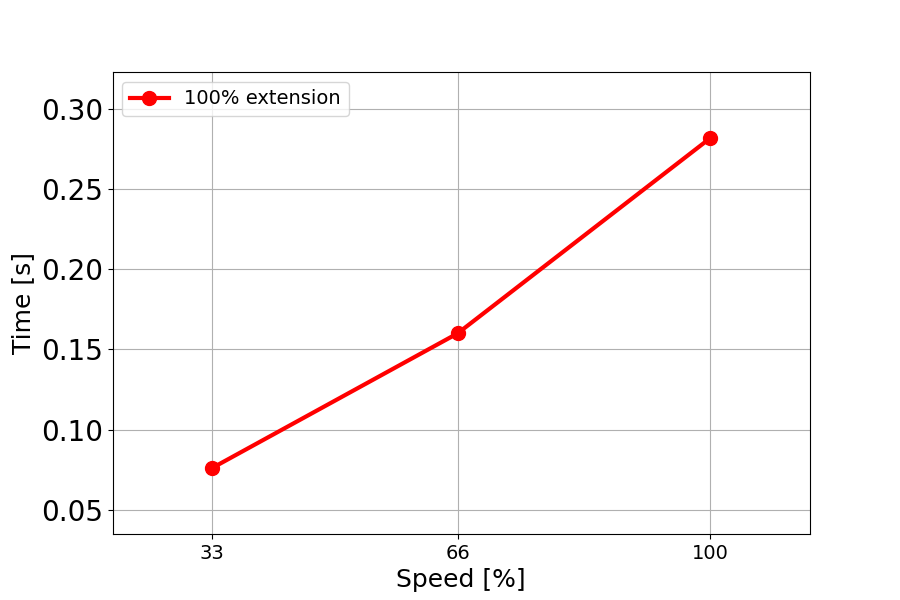
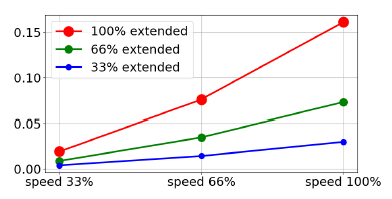
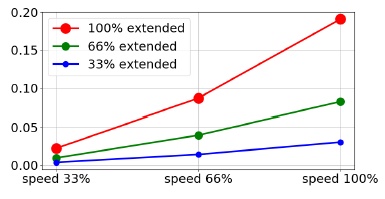
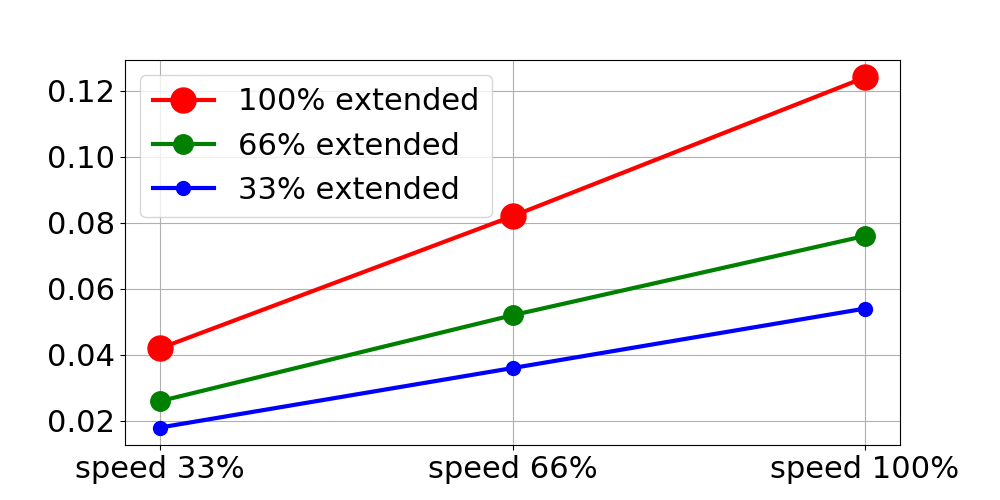
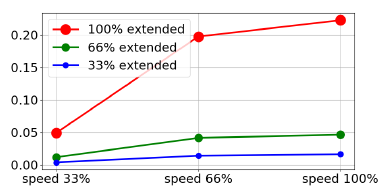
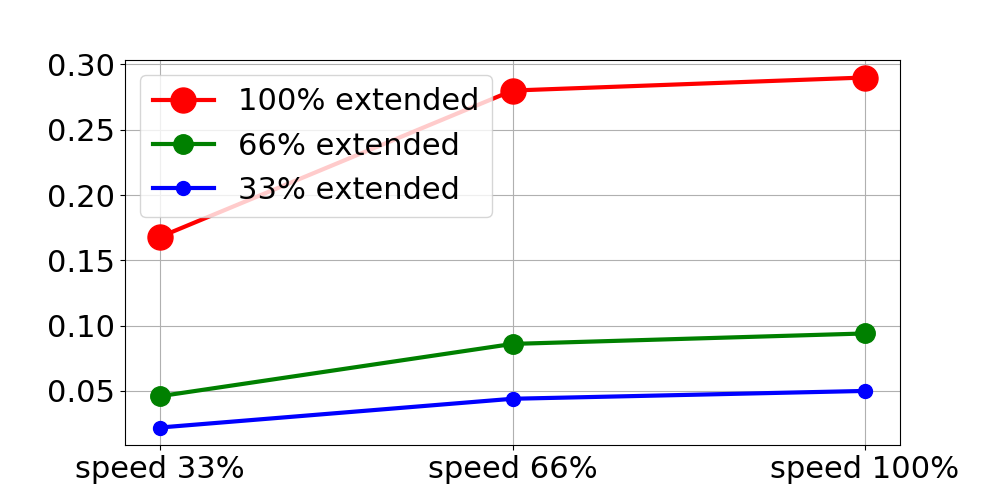
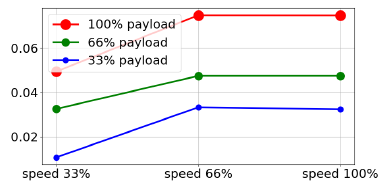
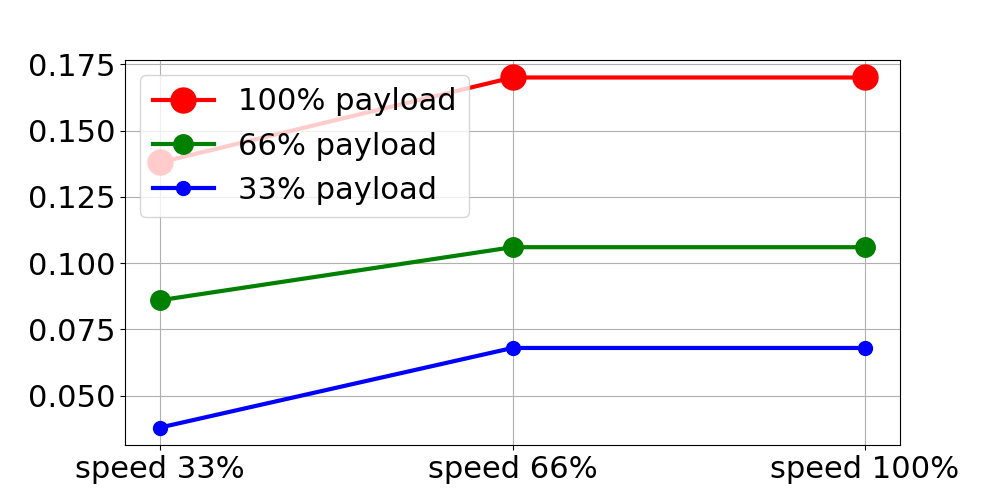
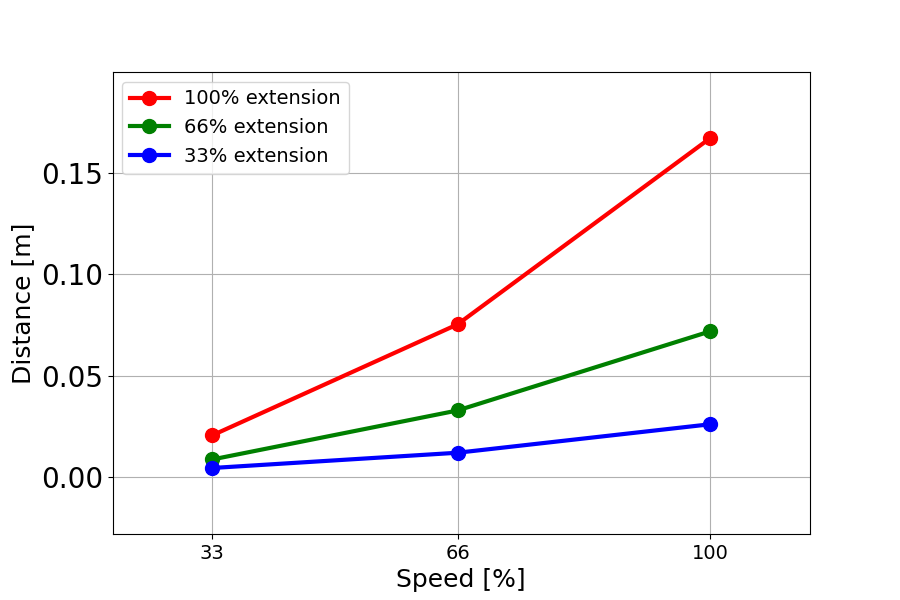
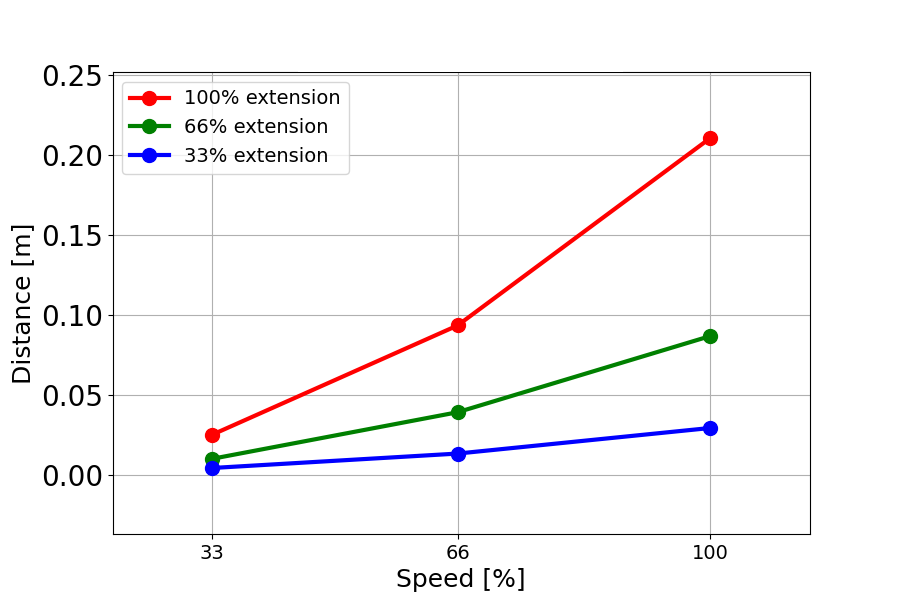
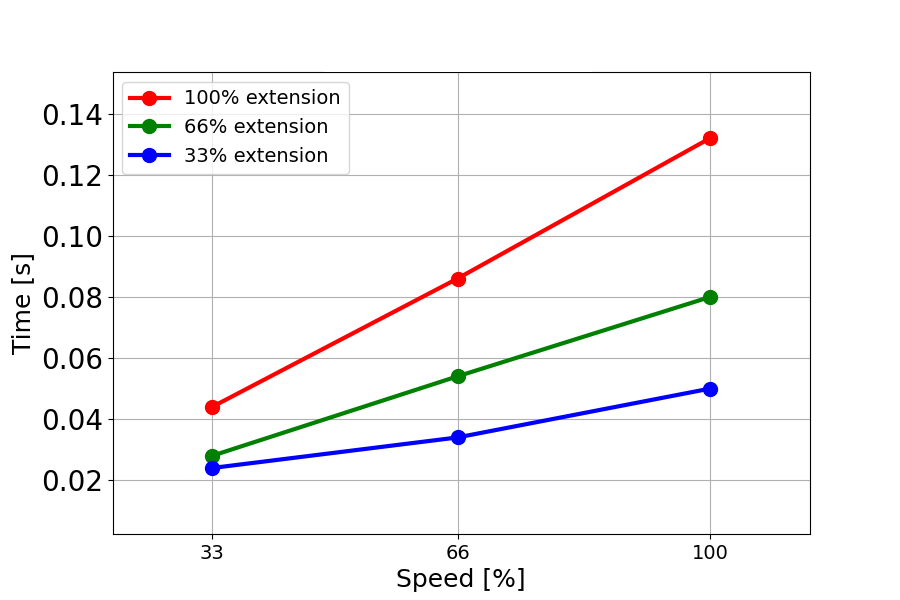
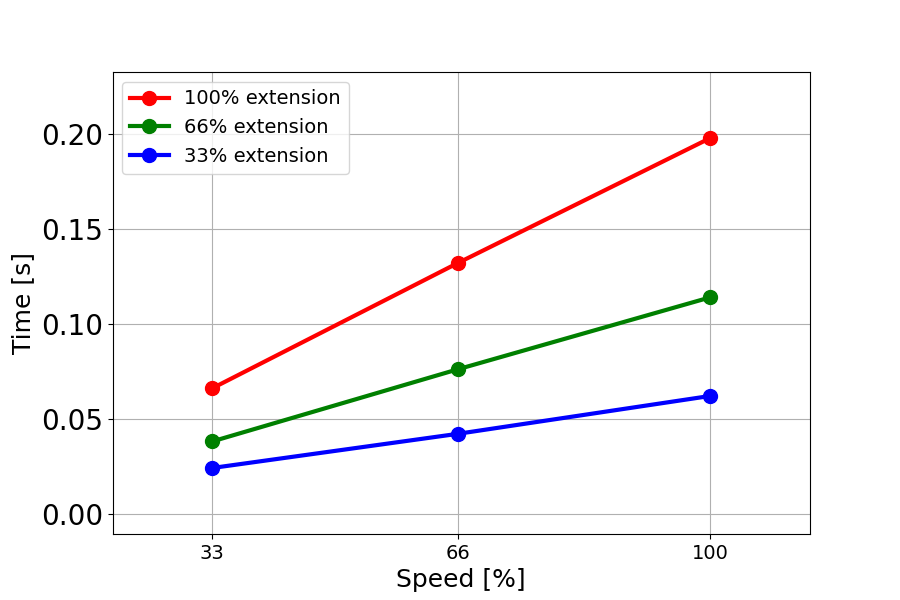
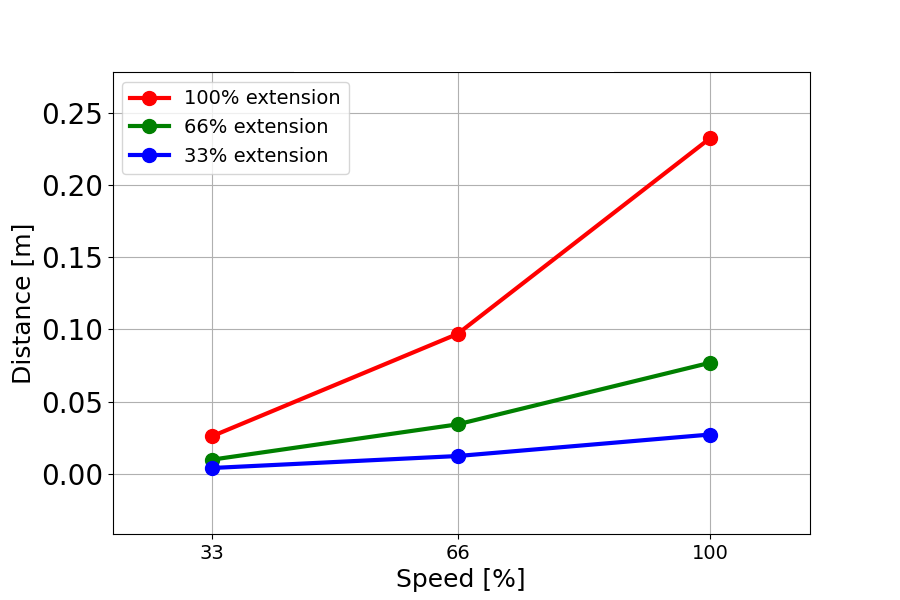
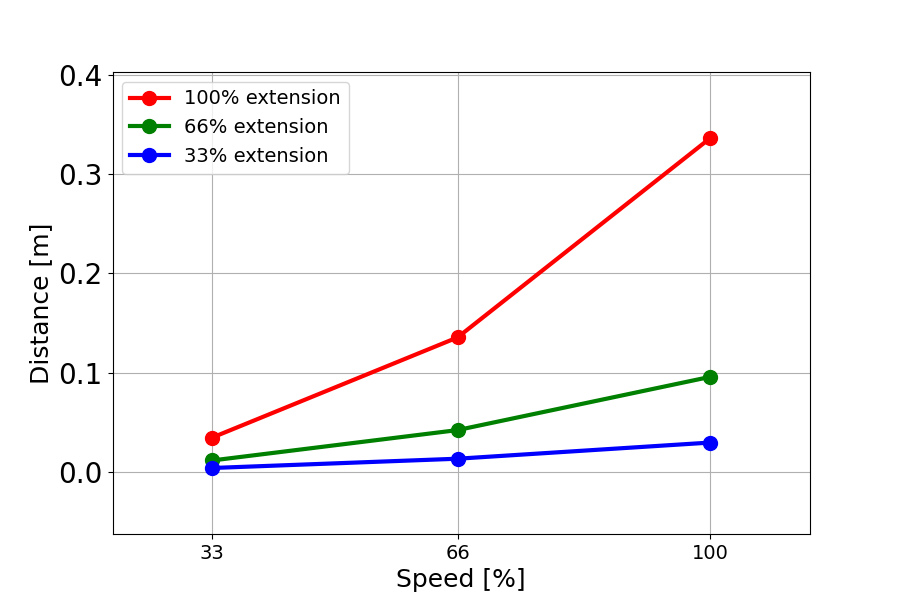
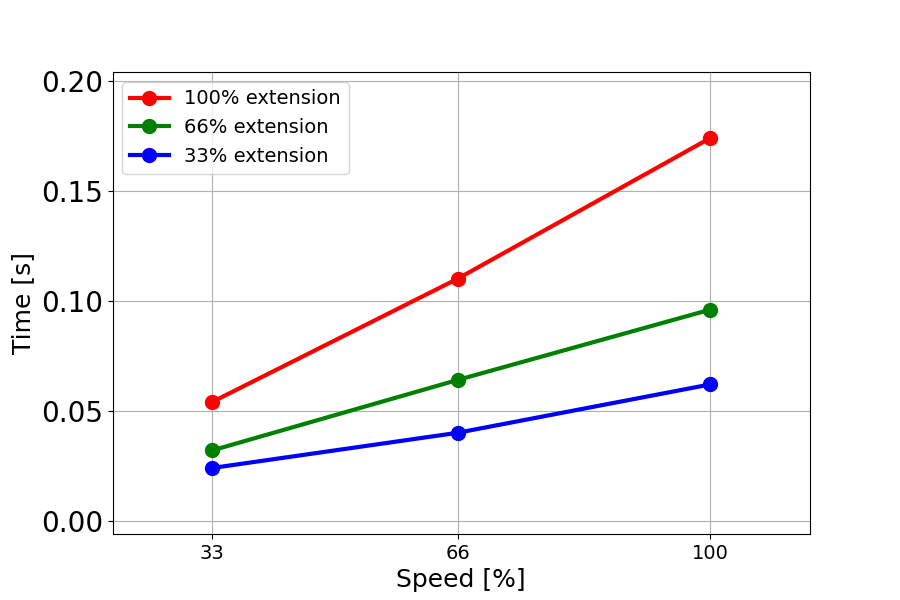
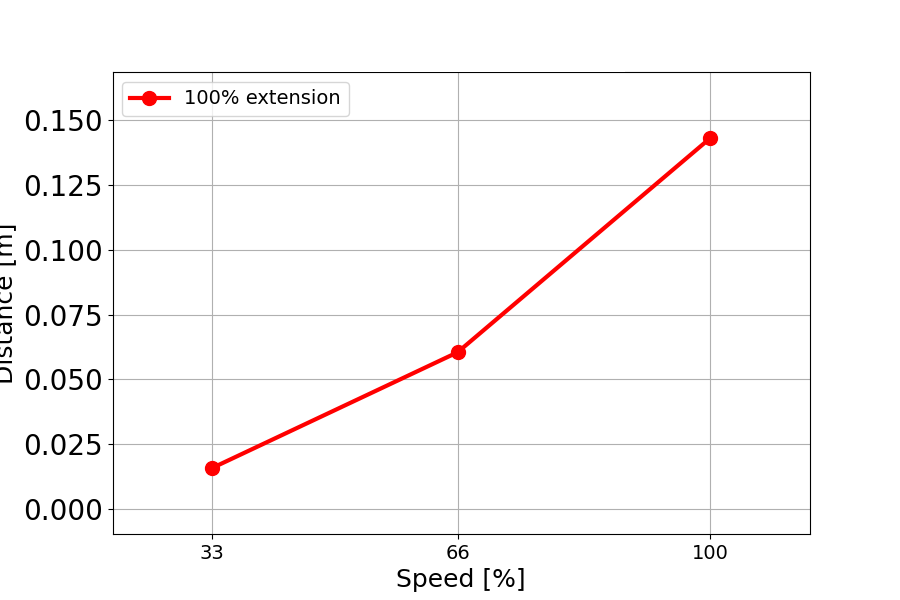
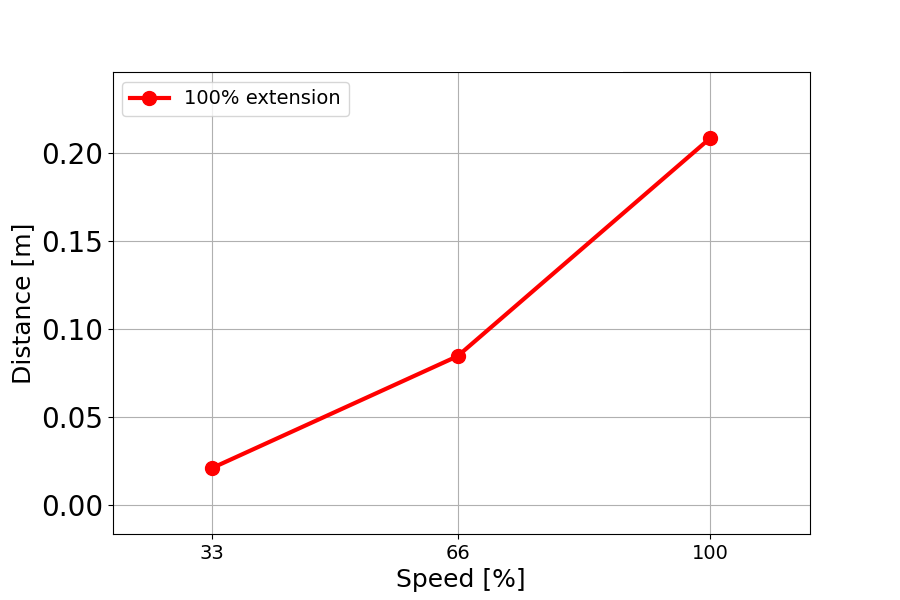
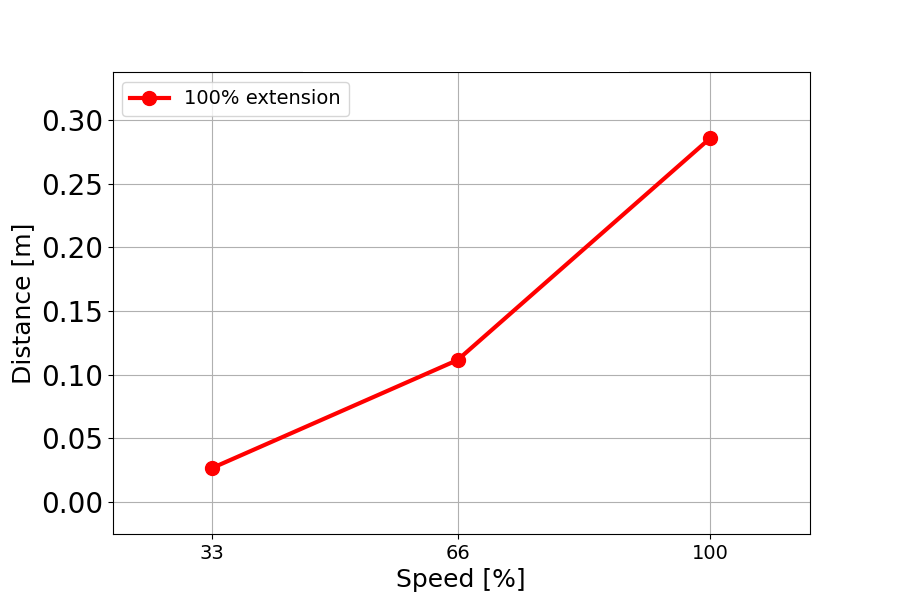
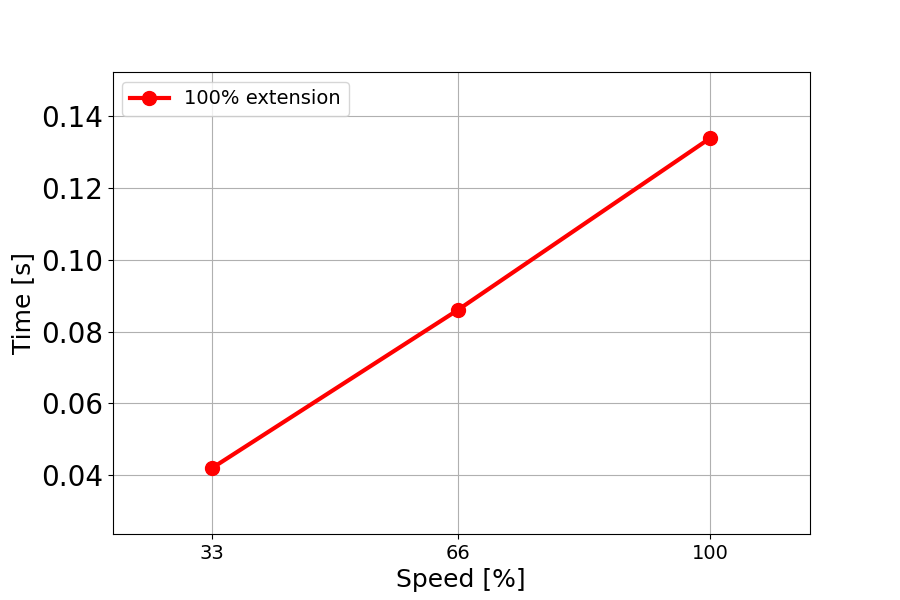
制动时间和制动距离
机器人场景 1:10 kg。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 关节 1(肩部)
|
|
|
|
|
|
|
|
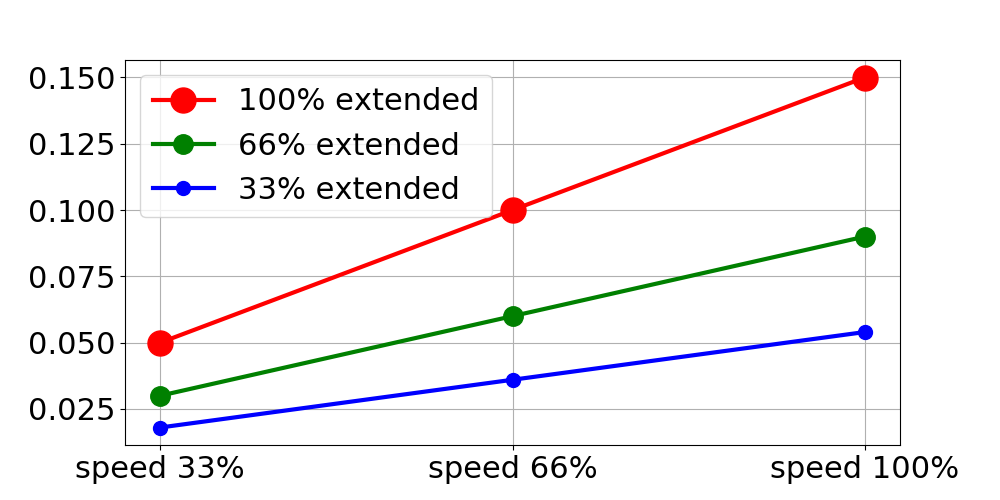
| 关节 1(肩部)
|
|
|
|
|
|
|
|
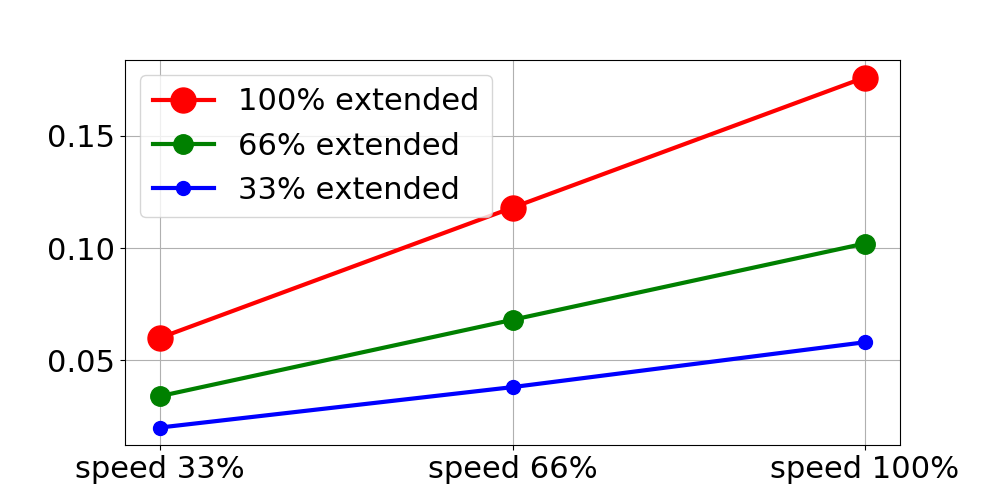
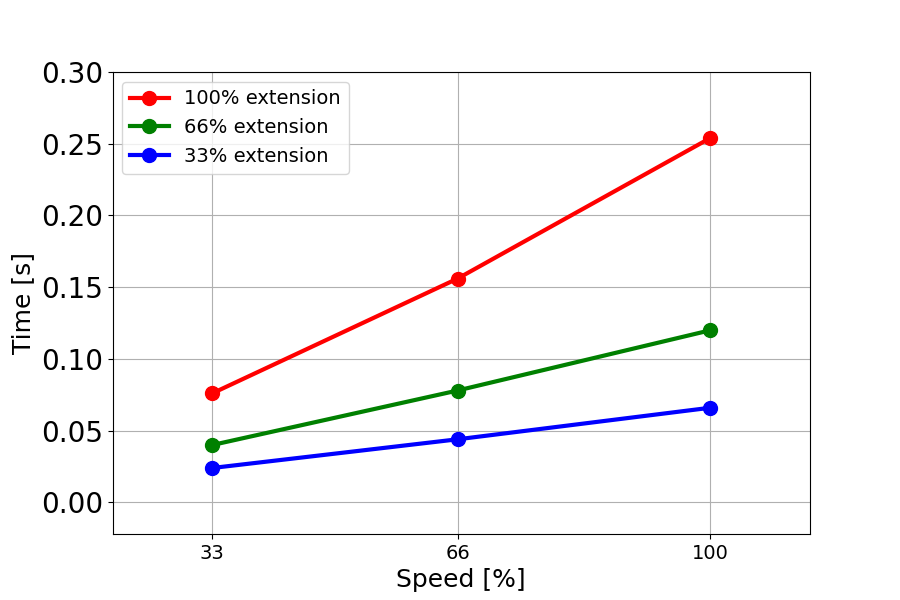
| 关节 2(肘部)
|
|
|
|
|
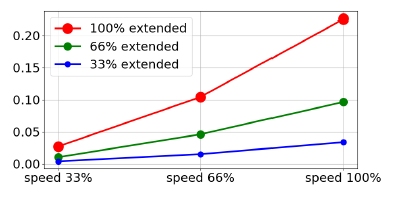
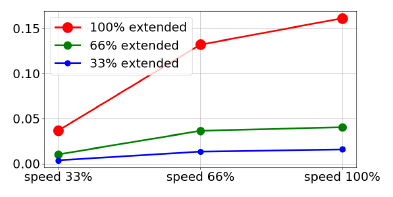
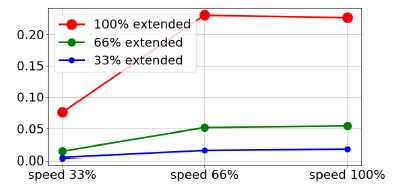
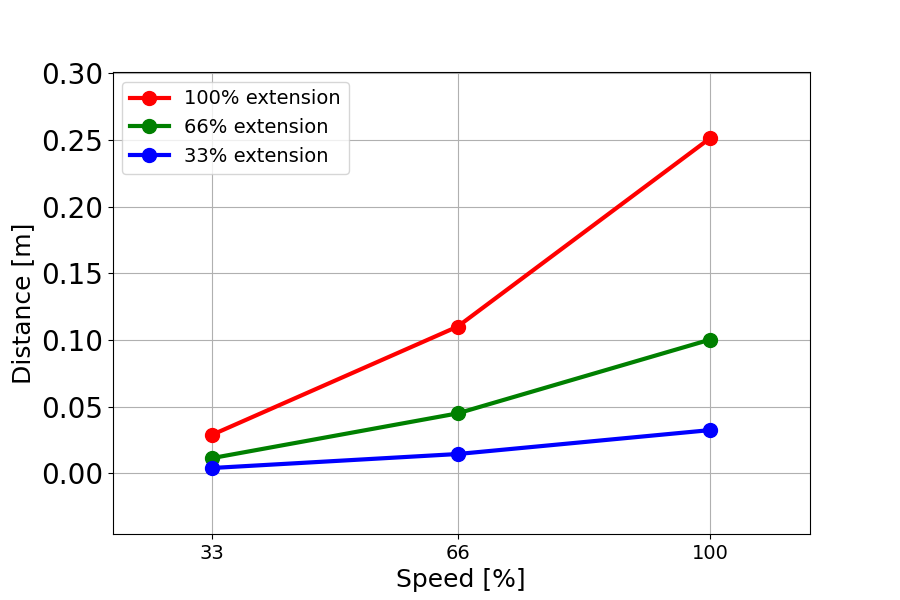
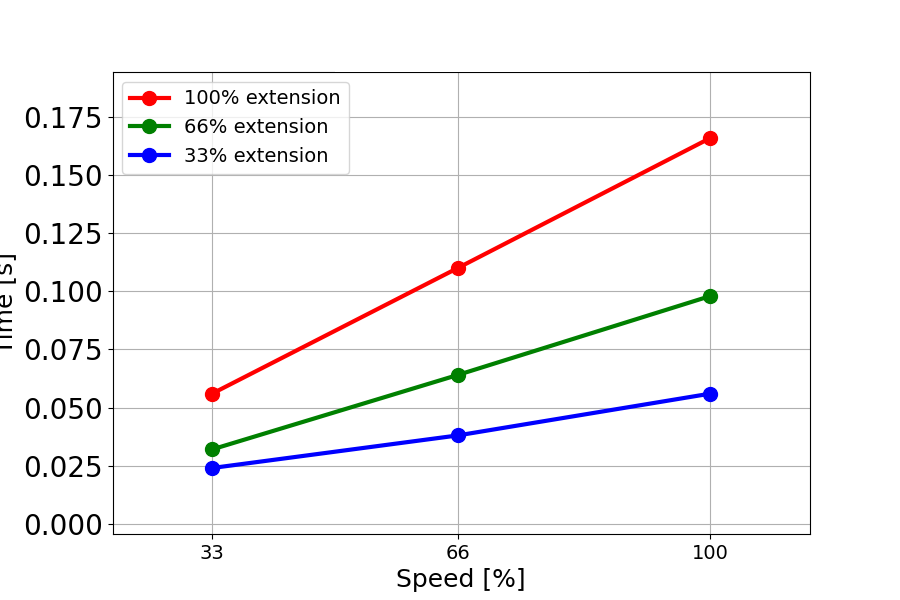
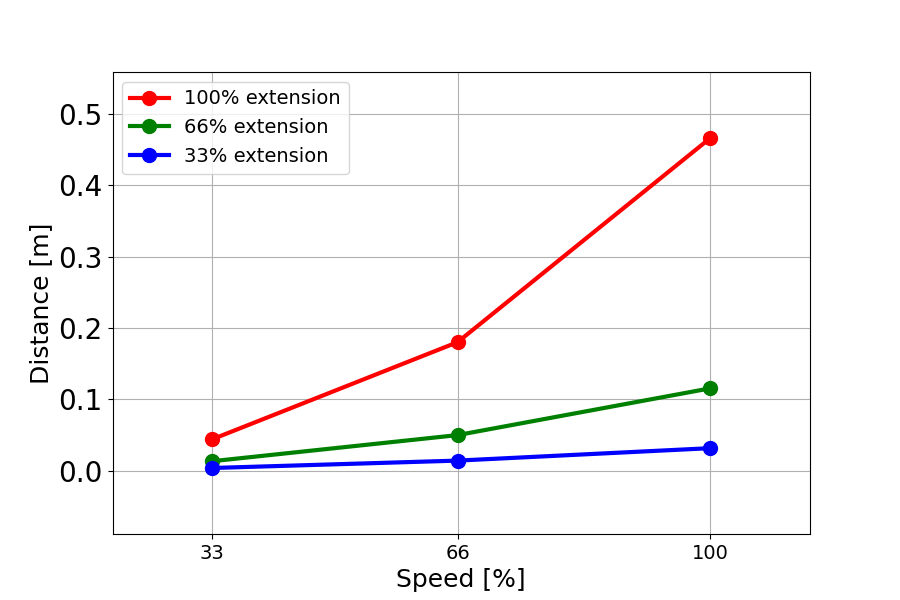
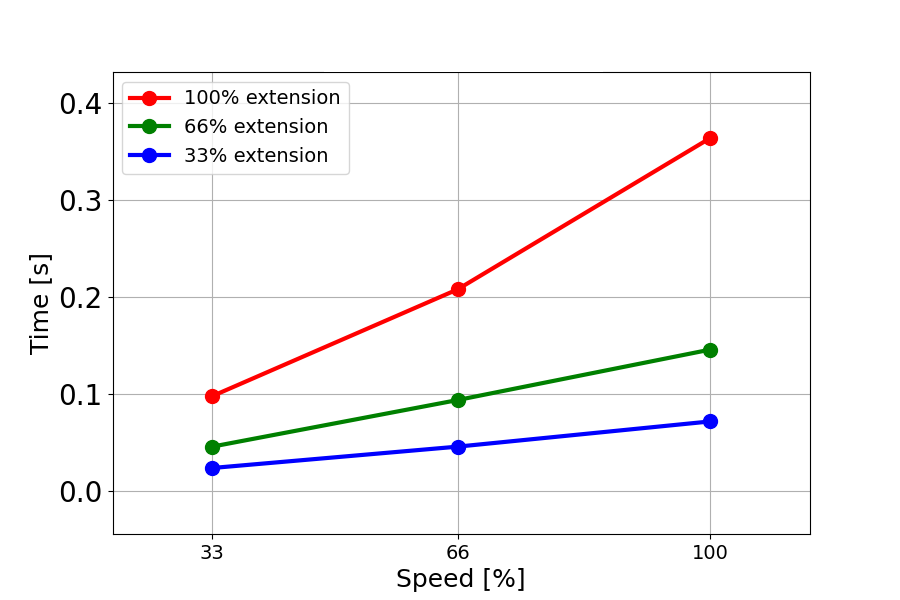
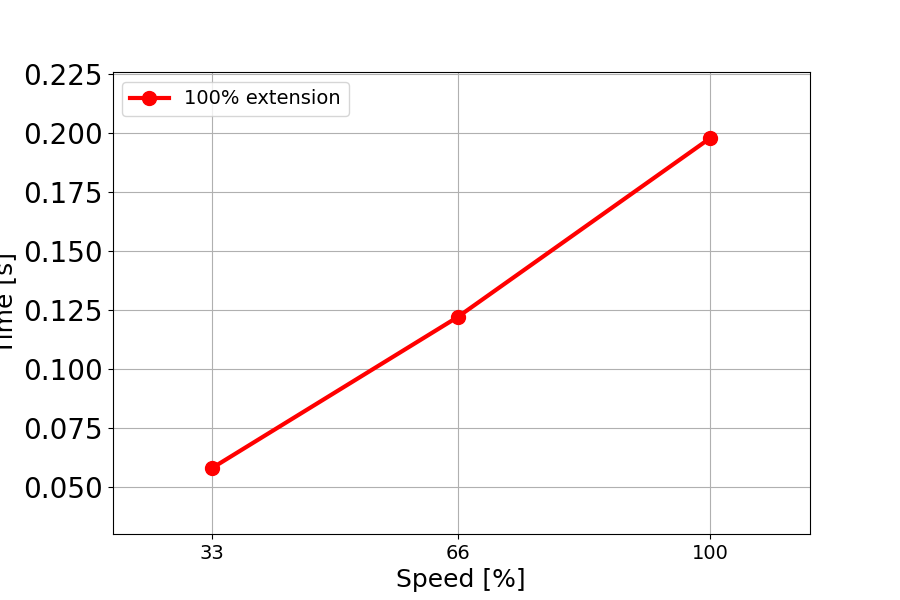
机器人场景 2:12.5 kg。
| 关节 0(基座) |
|
|
|
|
|
|
| 关节 0(基座)
|
|
|
|
|
|
|
| 关节 1(肩部)
|
|
|
|
|
|
|
|
| 关节 1(肩部)
|
|
|
|
|
|
|
|
| 关节 2(肘部)
|
|
|
|
|
|
|
|
| 关节 2(肘部)
|
|
|
|
|
|
|
|