I/O 平面
| 描述 |
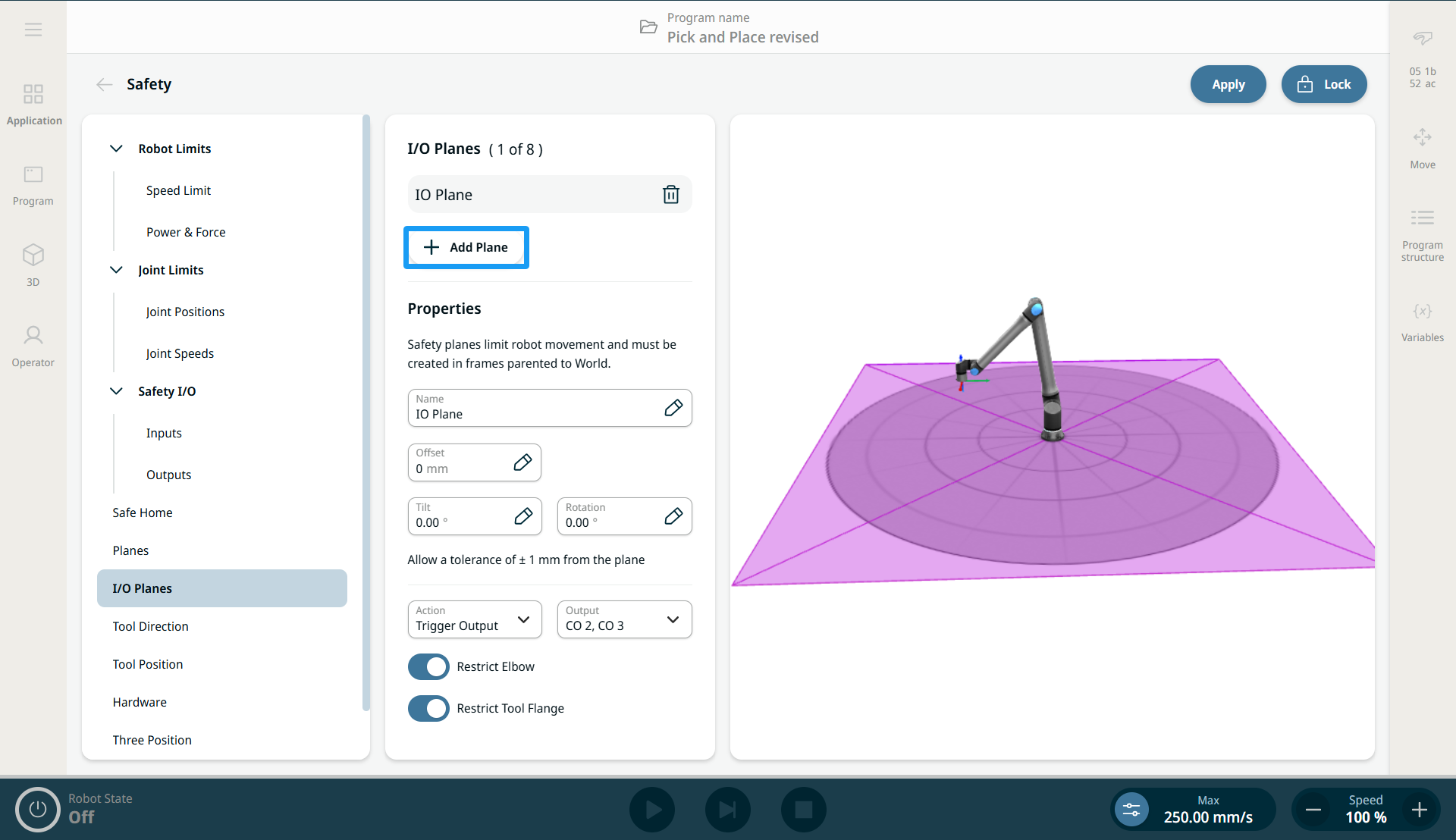
与标准安全平面相比,I/O 平面功能可以更灵活地使用安全平面。 安全平面功能。 通过它,您可以使用终端输入激活和禁用安全平面,和/或在安全球穿过安全平面时产生输出信号。
|
|
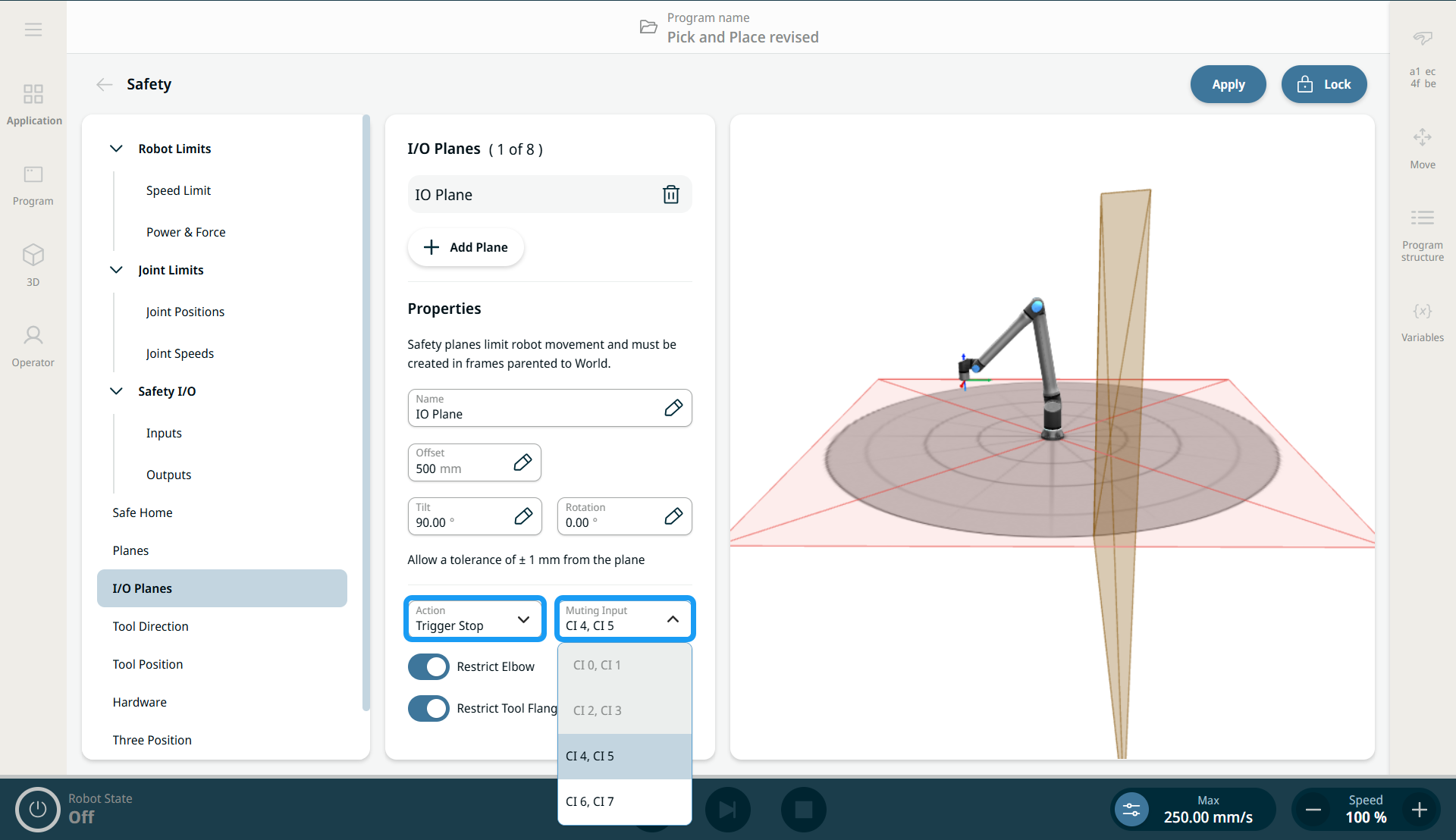
输入/停止平面 |
触发停止触发 I/O 平面停止。 可通过安全输入将其静音。 除非静音,否则向飞机方向移动会导致机器人停止并等待,直到安全输入将飞机静音。 当平面处于非活动状态时,机器人可以自由移动。 当平面处于活动状态,而机器人尚未穿越平面时,机器人将在穿越平面前停止。 如果平面被激活,而机器人正在平面边缘移动,机器人可能会最终越过平面,并在最坏的情况下根据配置的距离和停止时间限制停止。 当平面启动且机器人越过平面时,机器人将根据配置的停止距离和停止时间限制停止。 |
|
|
|
|
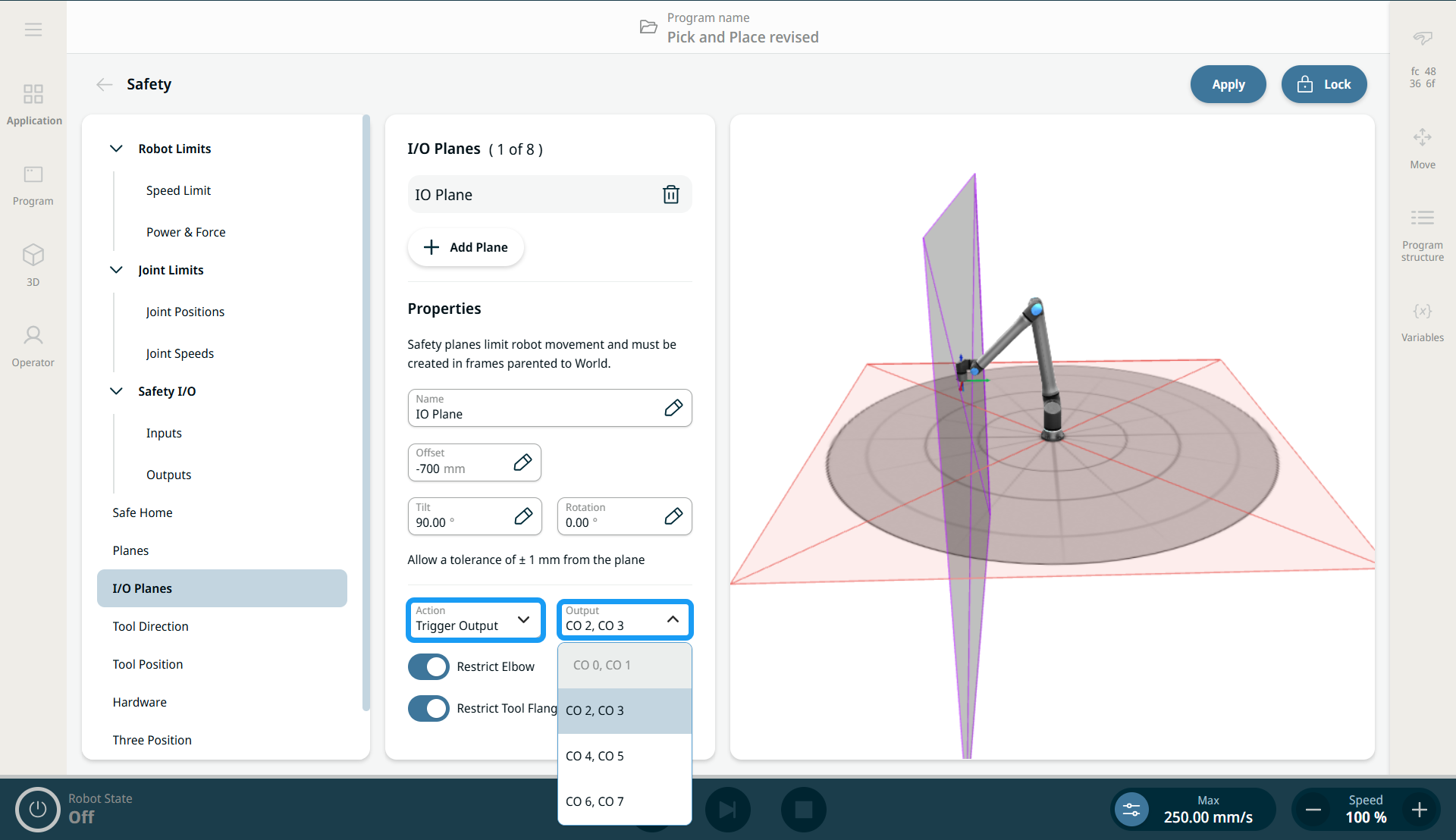
输出平面 |
触发输出根据一个或多个安全球是否越过平面生成安全输出。 当一个或多个安全球越过一个被定义为触发输出的平面时,与该平面相对应的安全输出被激活。 "激活 "意味着安全输出被电设置为 "低"。 当任何一个安全球越过触发输出所定义的平面时,与该平面相对应的安全输出将被激活。
|