I/O 设置
| 描述 |
使用I/O设置屏幕定义I/O信号,并使用I/O 选项卡控件配置操作。 I/O信号的类型列在 输入 和 输出下。
从 I/O 或现场总线输入启动程序时,机器人可以从它所在的位置开始移动,不需要通过 PolyScope 手动移动到第一个路点。
|
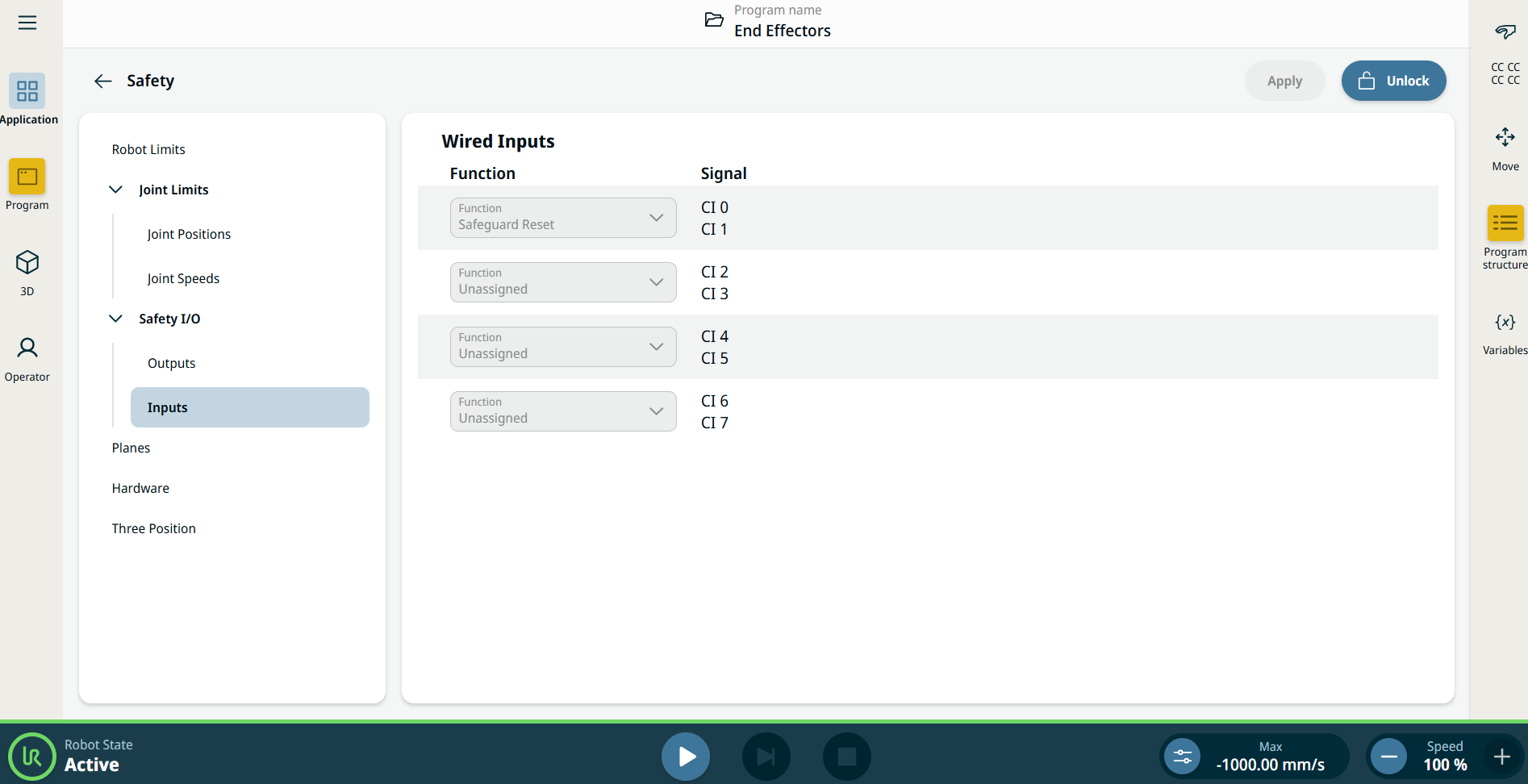
| 输入 |
有关安全功能的描述,请参阅“安全 I/O 信号”。
|
| 可用输入动作 |
如果机器人在使用开始输入动作时停止,则机器人在执行该程序之前会慢慢移动到程序的第一个航点。 如果机器人在使用开始输入动作时暂停,则机器人在恢复该程序之前会慢慢移动到暂停的位置。
|
| 输出 |
您可以在每个输出信号上启用 OSSD。 有关安全功能的描述,请参阅“安全 I/O 信号”。
|
| 可用输出动作 |
|
| 程序终止原因 |
下列任何原因都可能导致出现计划外程序终止:
|