抬升和搬运
| 描述 |
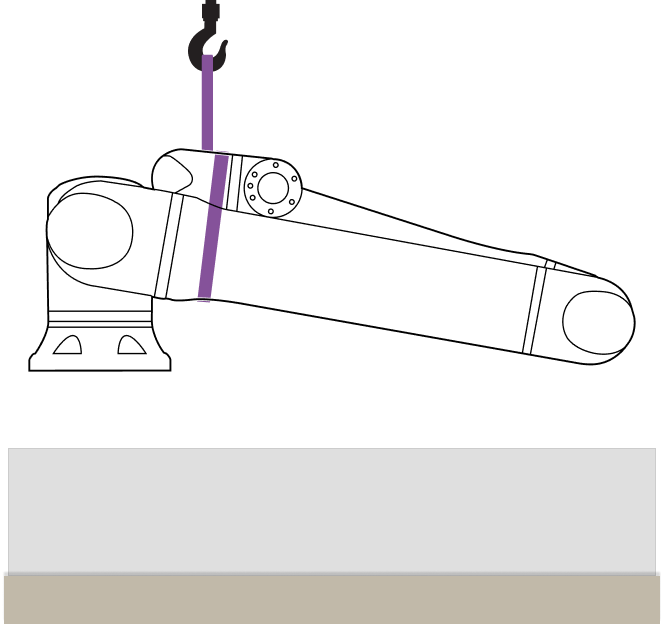
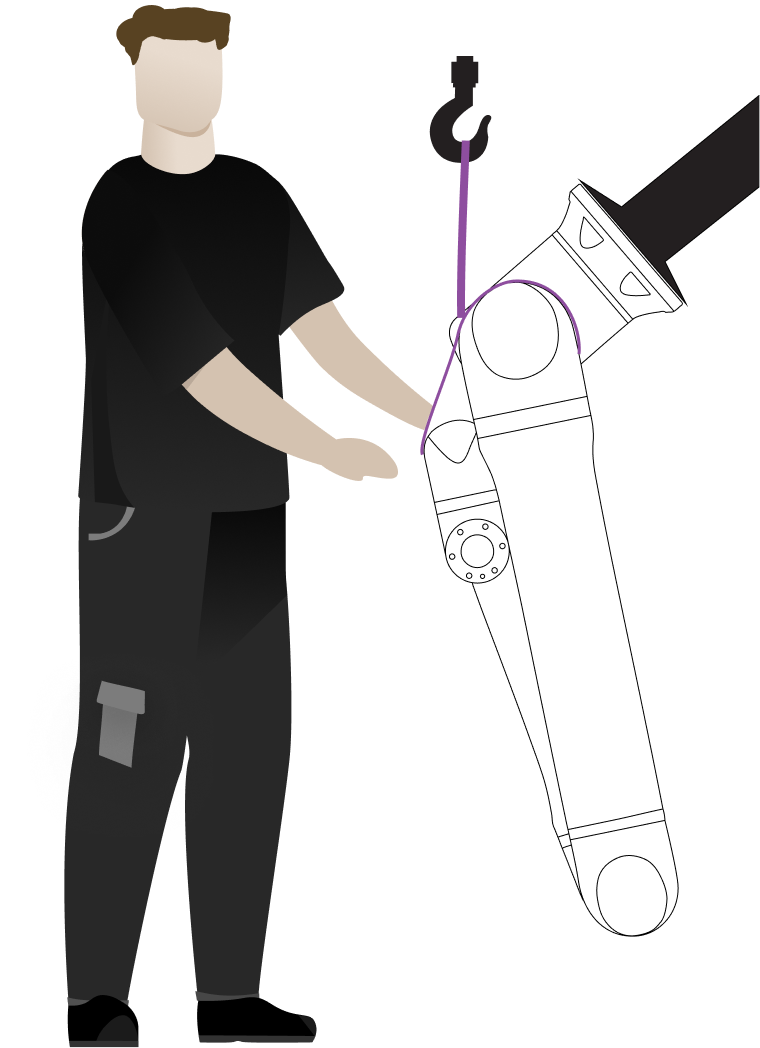
机械臂具有不同的尺寸和重量,因此务必为每种型号使用合适的抬升和搬运技术。 在这里,您可以找到有关如何安全抬升和搬运机器人的信息。
|
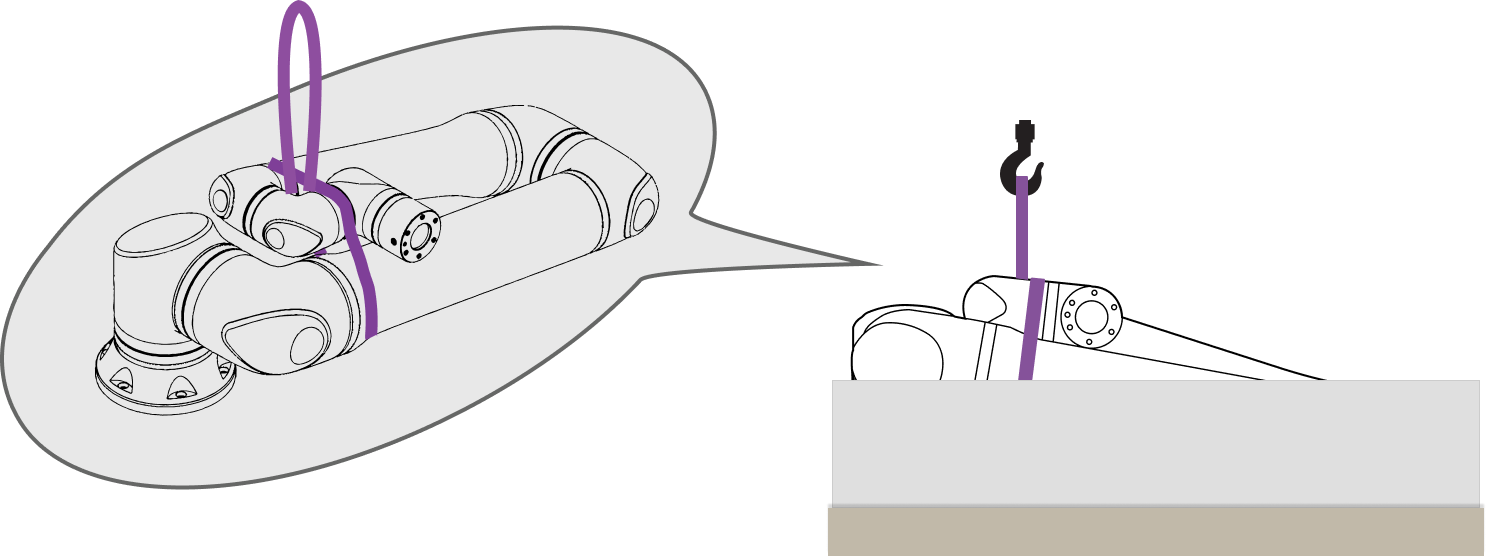
| 正确抬升和搬运 |
|
|
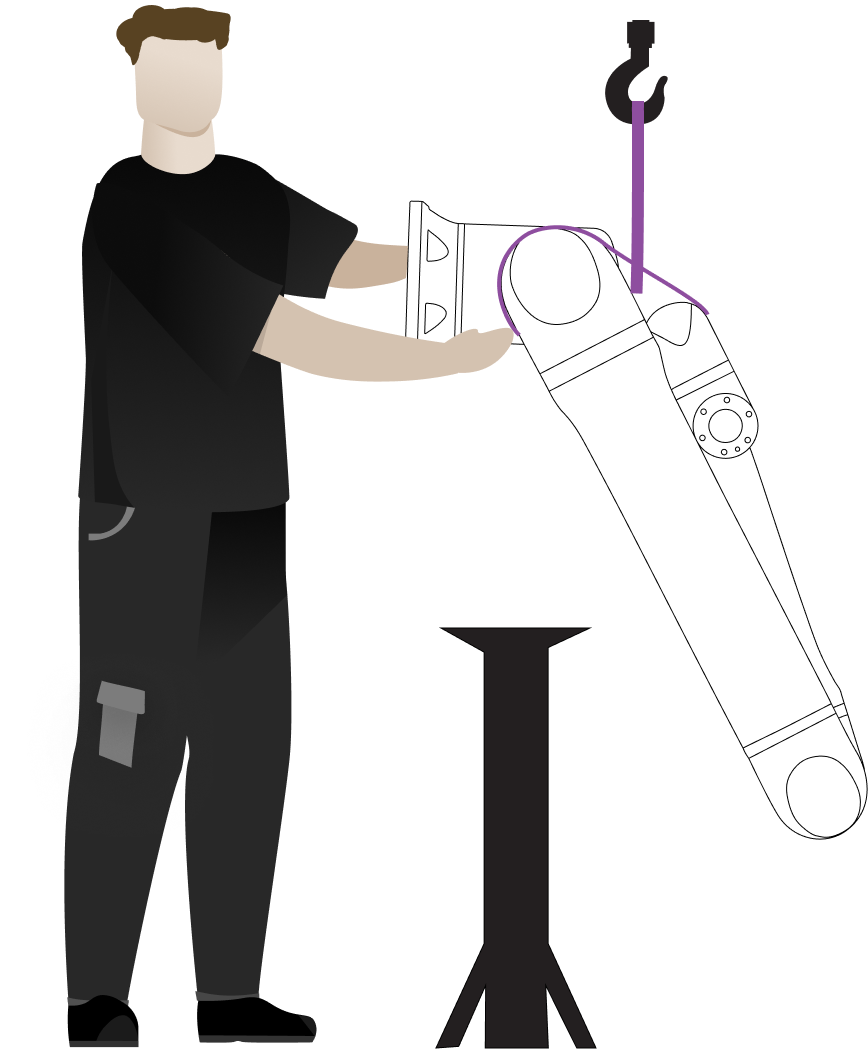
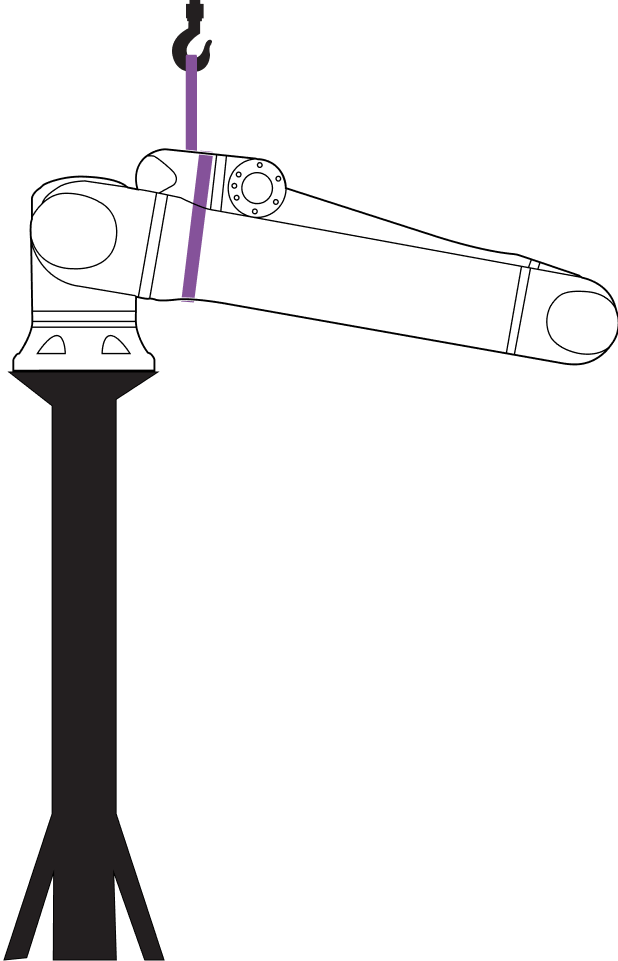
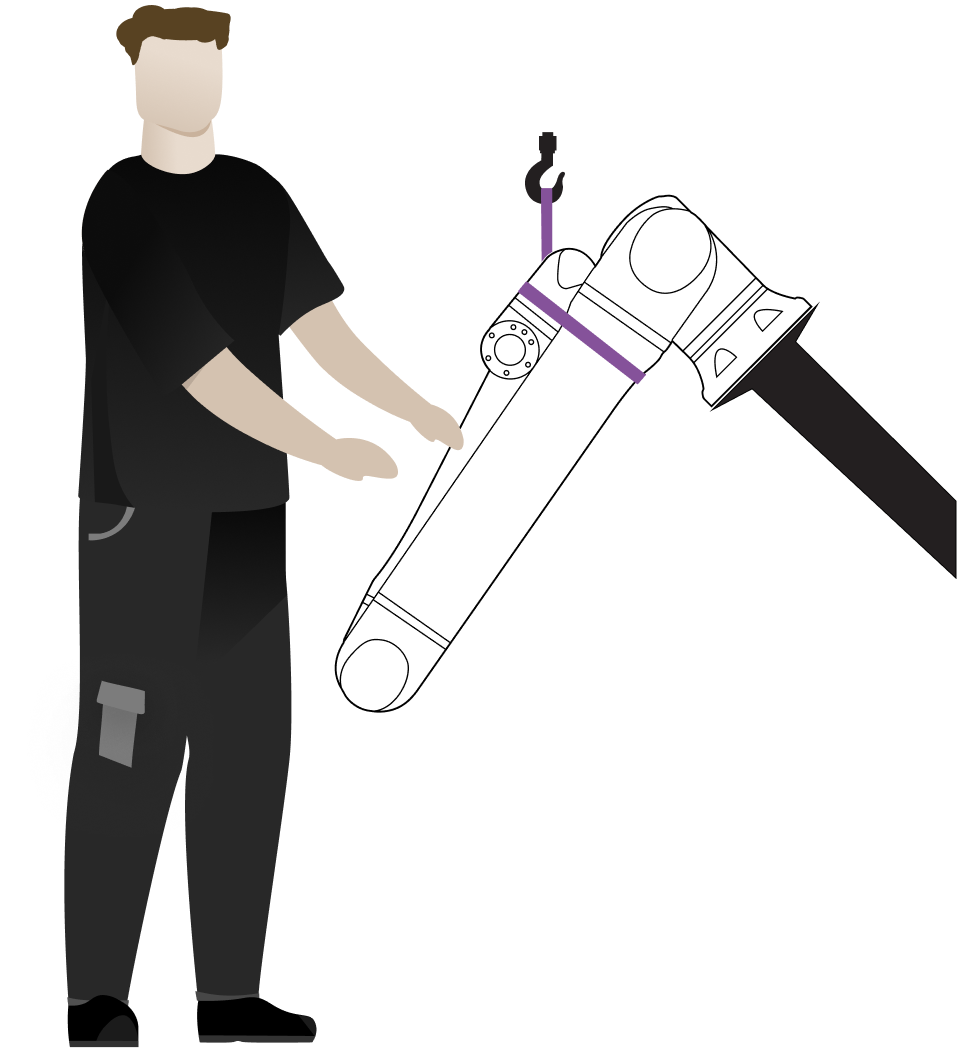
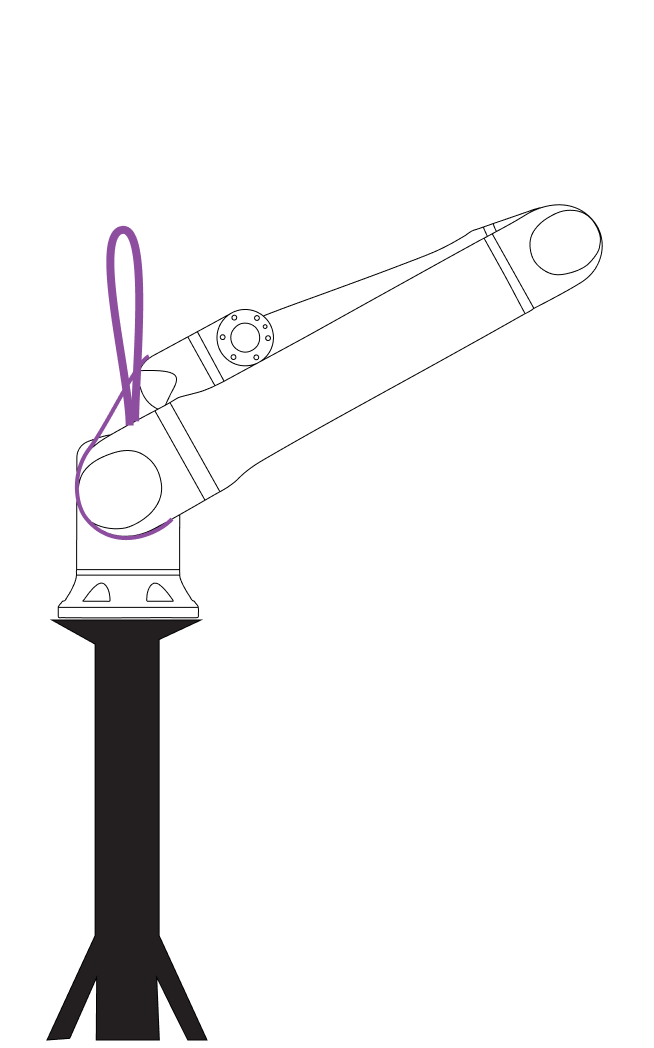
| 安装机械臂 |
机械臂可以侧向安装,也可以倒置安装或倾斜安装 (±45°)。
|
|
|
|
抬升或移动重型部件可能会导致人员受伤。
组件装配和/或接线错误可能会导致人员受伤。
|
|
|
如果不使用适合机器人重量的抬升装置,可能导致人员受伤和财产损失。 对于 UR30:
对于 UR20:
对于 UR15:
对于 UR8 Long:
对于 UR18:
您所在地区可能有关于装配抬升的具体规定。
有关详细的安装说明,请参阅“组装”一节。
|