安全 I/O 信号
| 描述 |
I/O 分为输入和输出部分,并且成对出现,以便每个功能提供一个 3 类 PLd I/O。
从 I/O 或现场总线输入启动程序时,机器人可以从它所在的位置开始移动,不需要通过 PolyScope 手动移动到第一个路点。
|
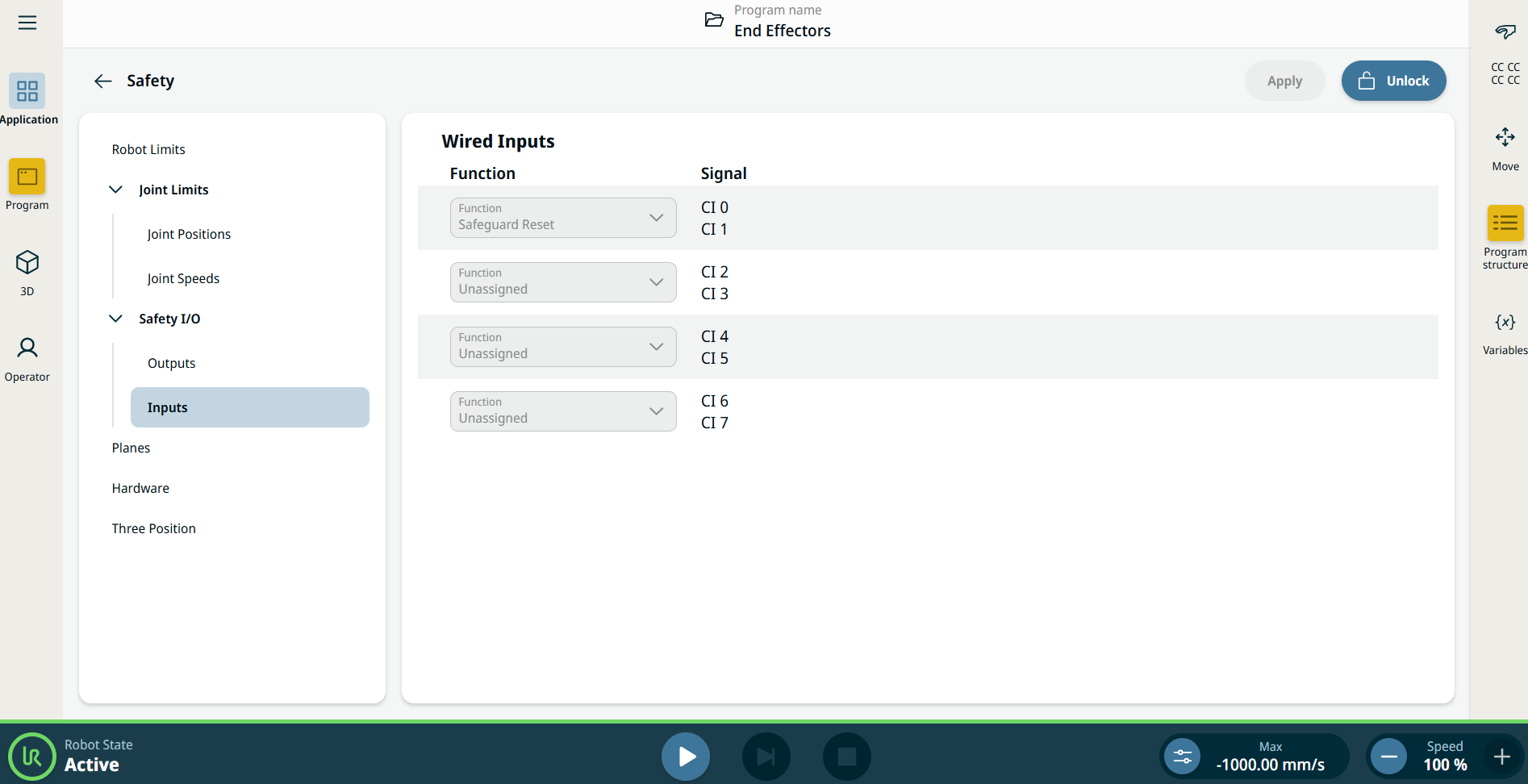
| 控制箱 输入 |
下表介绍了这些输入:
默认的防护复位被禁用后,当防护装置不再触发停止时就会自动复位。 如果一个人穿过防护装置的区域,就会发生这种情况。 如果防护装置未检测到人员,并且该人暴露于危险之中,标准情况下会禁止自动复位。
启用自动模式防护停止后,在手动模式下不会触发防护停止。
|
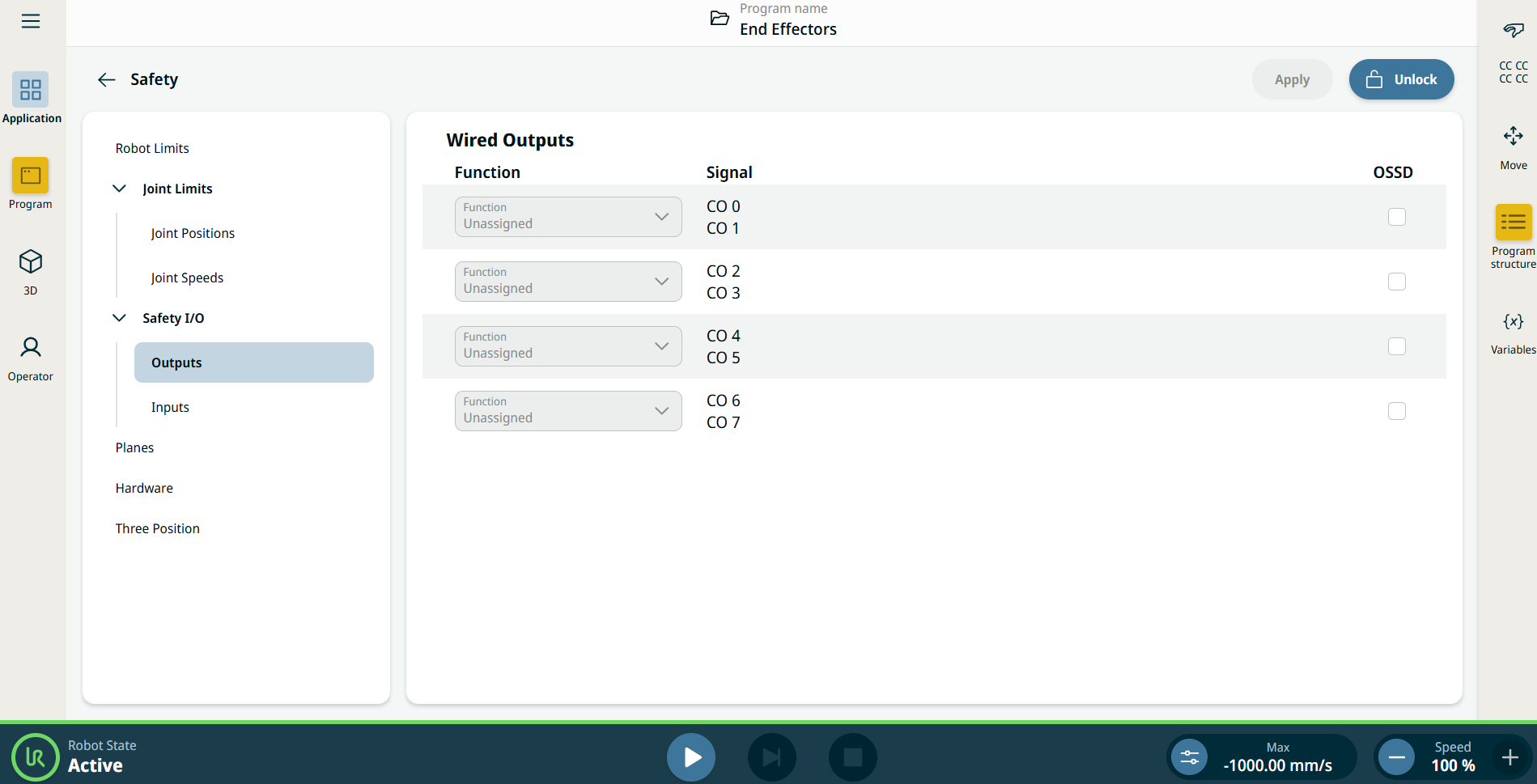
| 控制箱输出 |
如果发生安全系统违规或故障,所有安全输出会变为低电平。 这意味着即使未触发急停,系统停止输出也会发起停止信号。 您可以使用以下安全功能输出信号。 触发高电平信号的状态结束后,所有信号都将恢复成低电平:
通过系统停止输出从机器人获得紧急停止状态的任何外部机械必须符合 ISO 13850。 在机器人紧急停止输入连接到外部紧急停止设备的设置中,这一点尤其必要。 这种情况下,当外部紧急停止装置释放后,系统停止输出信号将变为高电平。 这意味着外部机械的紧急停止状态将被重置,而无需机器人操作员进行手动操作。 因此,为了符合安全标准,外部机械必须需要手动操作才能恢复。
|