机器人限值
| 限制 |
|
|
| 安全模式 |
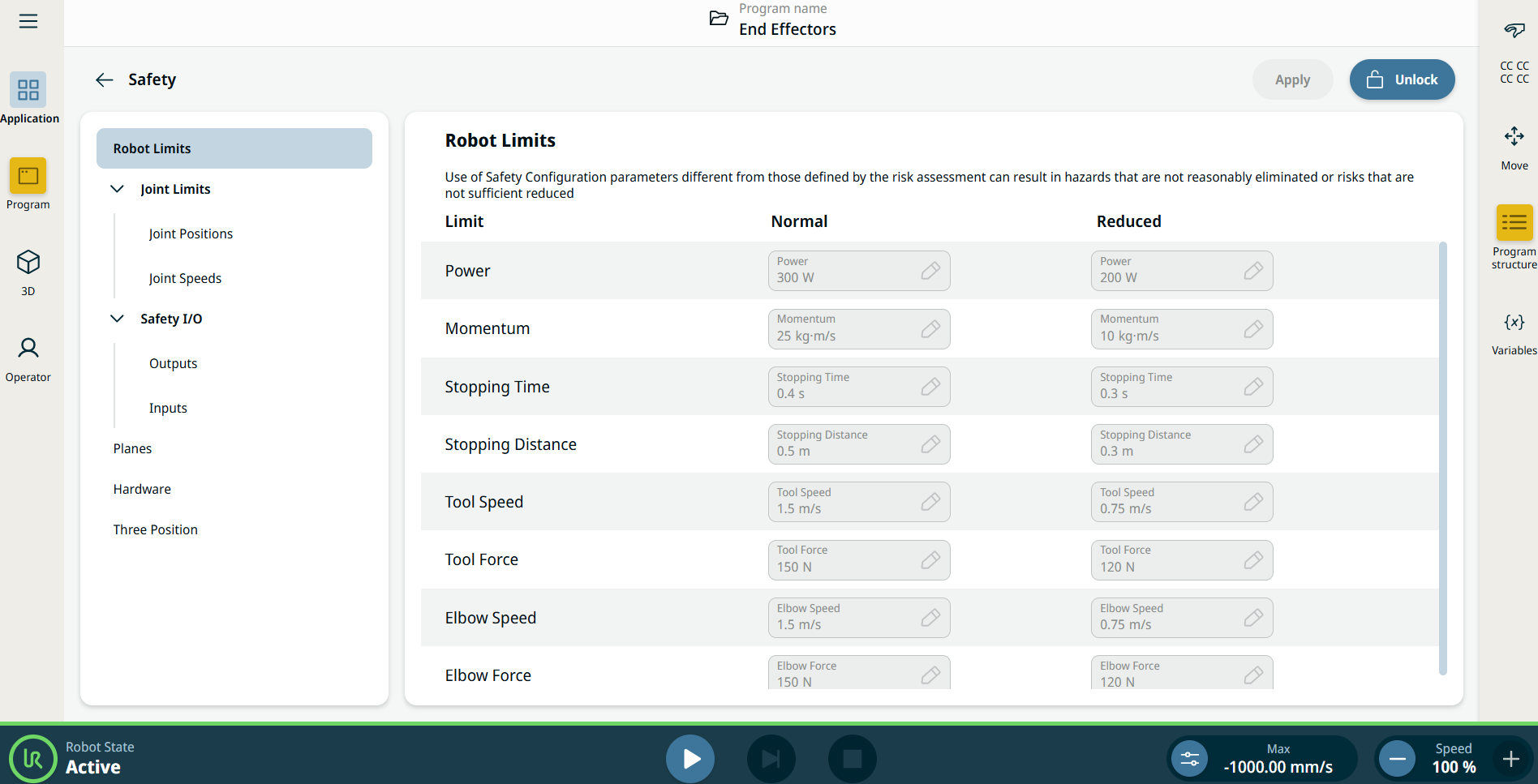
限制停止时间和距离会影响机器人的整体速度。 例如,如果停止时间设置为300 ms ,则最大机器人速度将受到限制,允许机器人在300 ms内停止。 工具速度和力被限制在工具法兰和用户定义的两个工具位置的中间 在正常情况下(即没有实施机器人停止时),安全系统将在关联了一组安全限值的安全模式下运行 1:
|