PROFIsafe
| 高级选项 |
发送到安全PLC的状态消息包含下表中的信息。
|
| 高级选项 |
|
| 高级选项 |
|
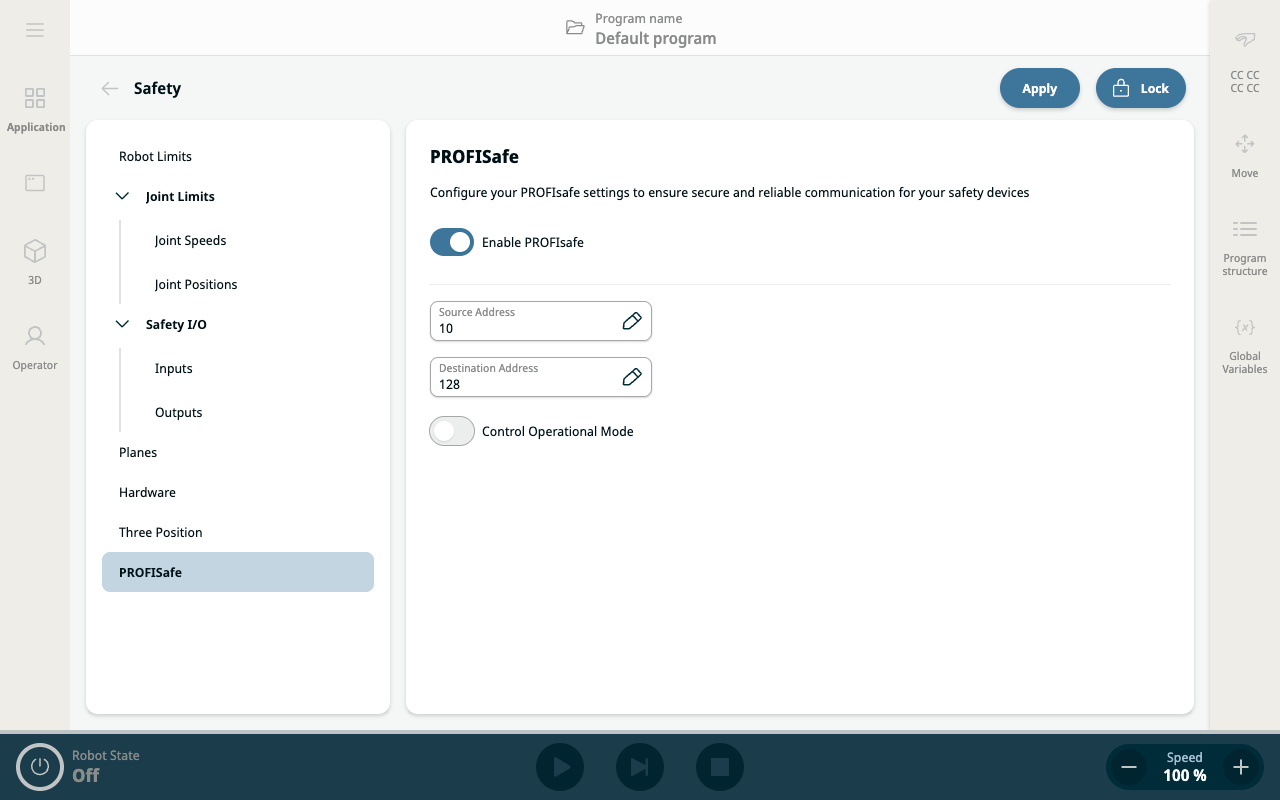
| 配置PROFIsafe |
|
|
|
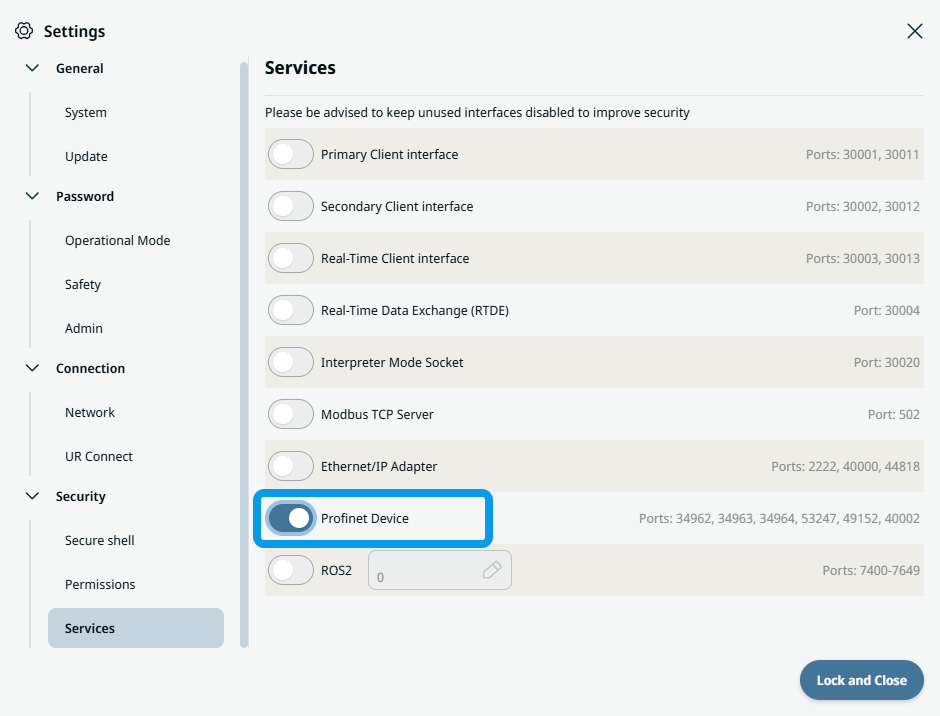
为了配置和使用 PROFIsafe,必须在安全服务设置菜单中启用 Profinet 设备。
 有关详细信息和界面位置,请参阅 PROFINET 部分。
|