确定支架尺寸
| 描述 |
安装机械臂的结构(支架)是机器人安装的关键部分。 支架必须结实,没有任何外部来源引起的振动。
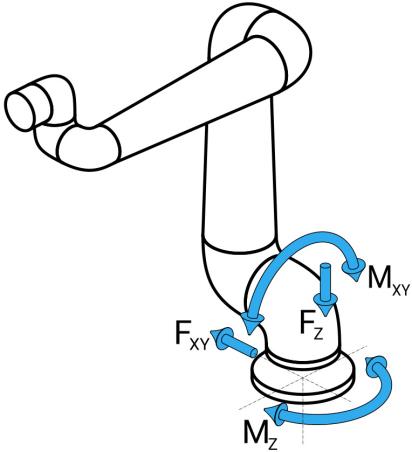
每个机器人关节都会产生扭矩,使机械臂移动和停止。 在正常的不间断运行和停止运动期间,关节扭矩会以下列形式传递到机器人支架:
基座法兰处的力和力矩定义。 |
|
确定支架尺寸 |
负载的大小取决于机器人型号、程序和其他多种因素。 支架的尺寸应考虑机械臂在正常的不间断运行期间以及在 0、1 和 2 类停止运动期间产生的负载。 在停止运动期间,允许关节超过最大标称工作扭矩。 停止运动过程中的负载与停止类别类型无关。 下表所列的值是最坏情况下运动的最大标称负载乘以安全系数 2.5。 实际负载不会超过以下值。
0、1 和 2 类停止期间的最大关节扭矩。
正常运行期间的最大关节扭矩。 通常可以通过降低关节的加速度限值来降低正常操作负载。 实际操作负载取决于应用和机器人程序。 您可以使用 URSim 评估特定应用中的预期负载。 |
安全裕度 |
您可以增加额外的安全裕度,同时考虑以下设计因素:
|