Kaldırma ve Taşıma
| Açıklama |
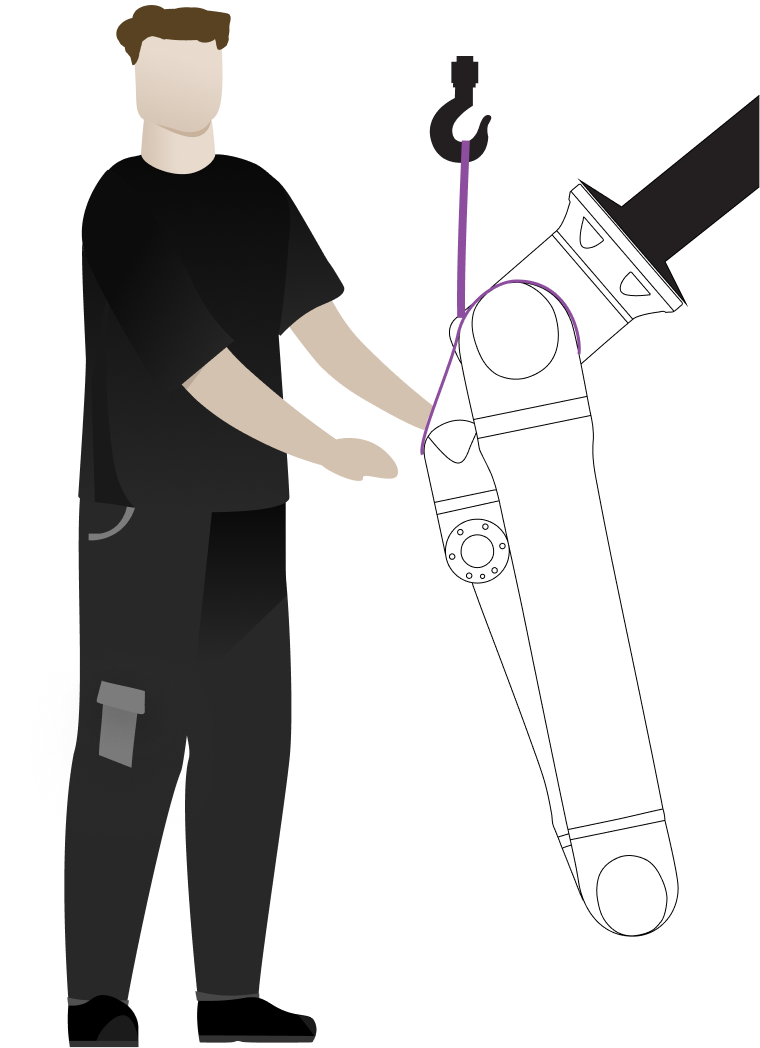
Robot kollar, farklı boyut ve ağırlıklarda gelir, bu nedenle her model için uygun kaldırma ve taşıma tekniklerini kullanmak önemlidir. Burada robotun nasıl güvenli bir şekilde kaldırılacağı ve taşınacağı hakkında bilgi bulabilirsiniz.
|
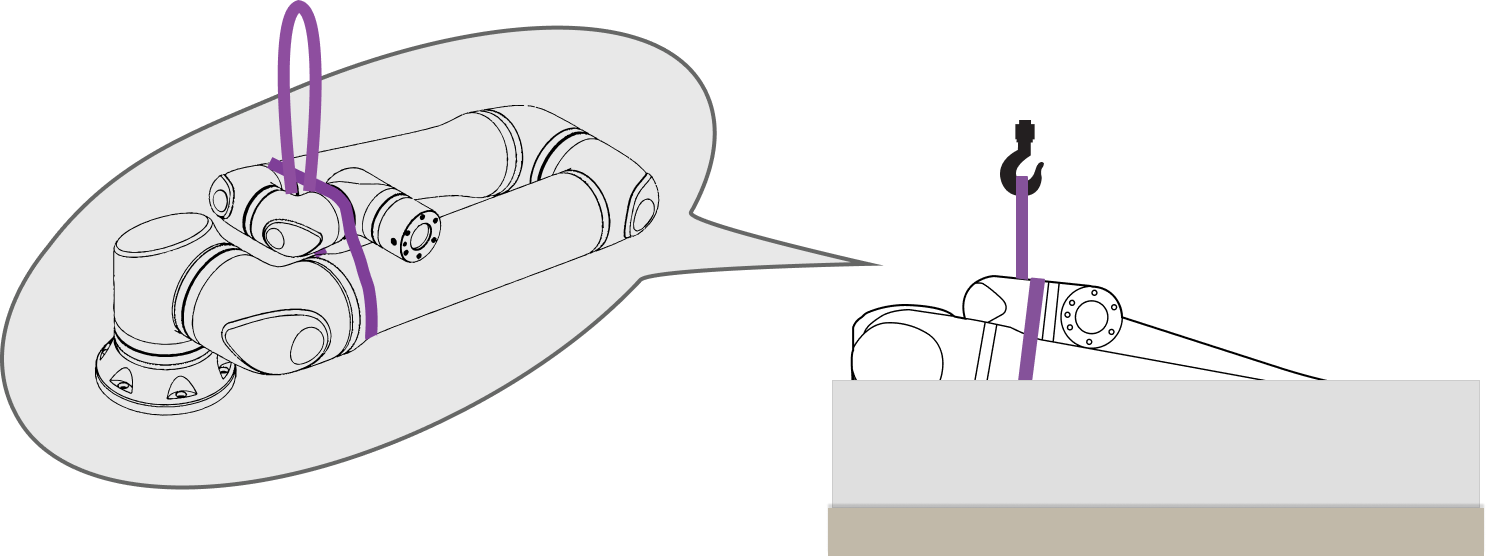
| Doğru kaldırma ve taşıma |
|
|
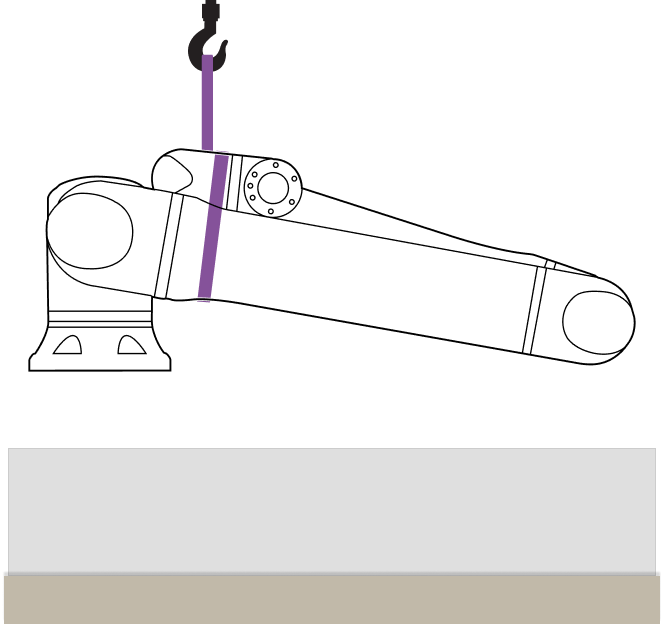
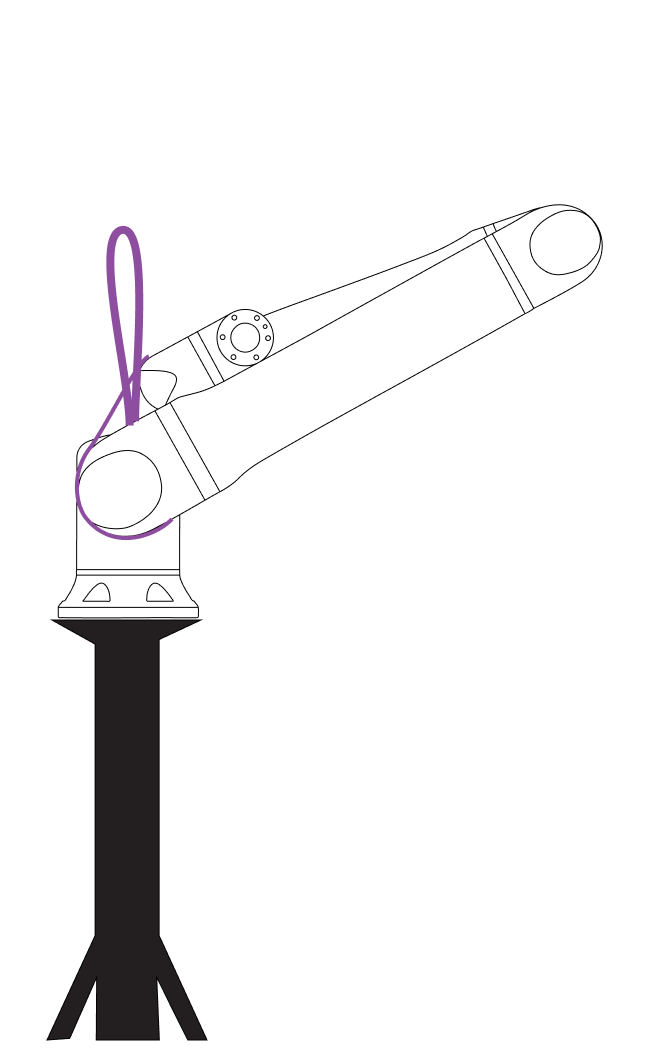
| Robot Kolun Montajı |
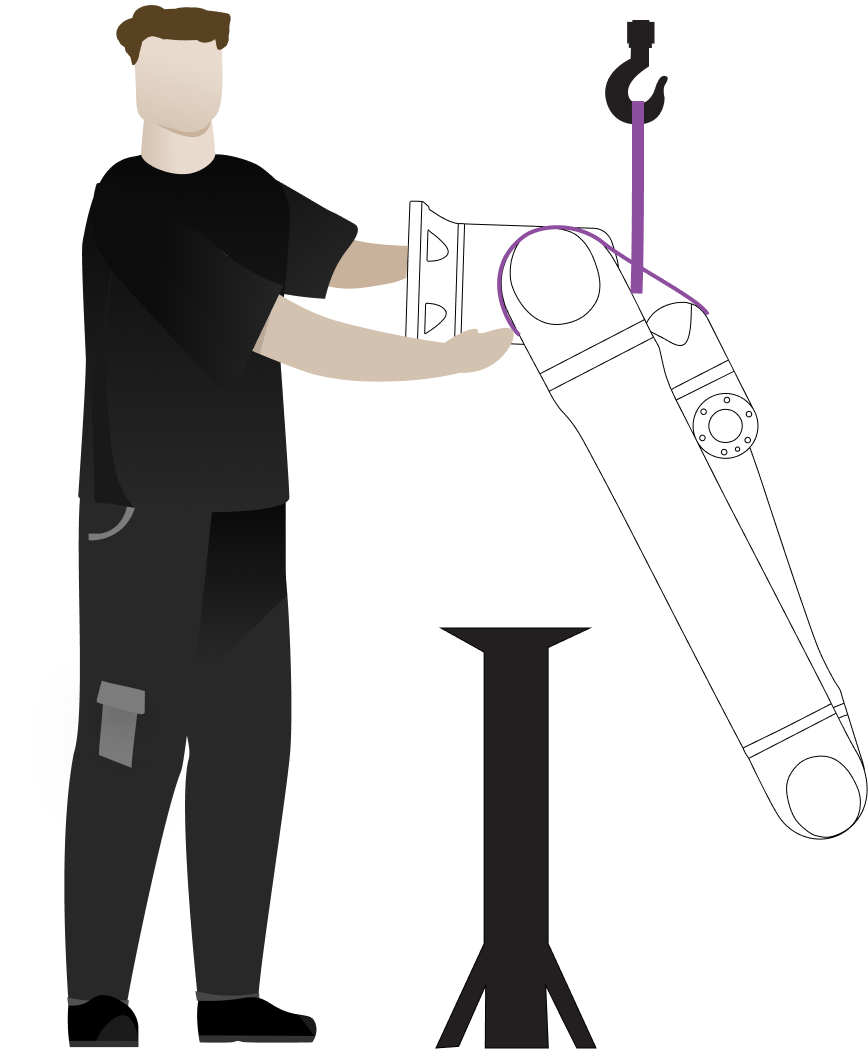
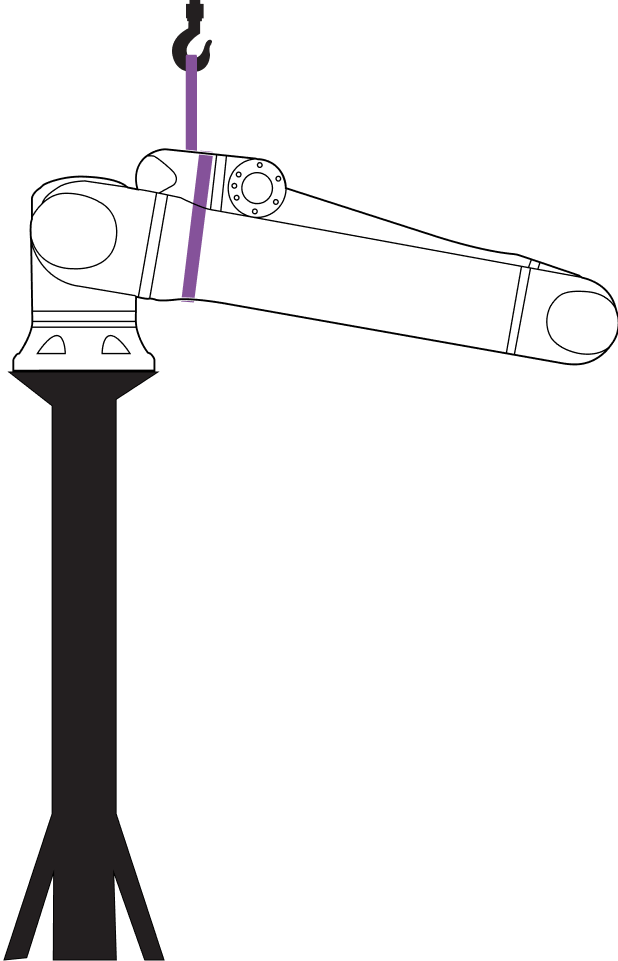
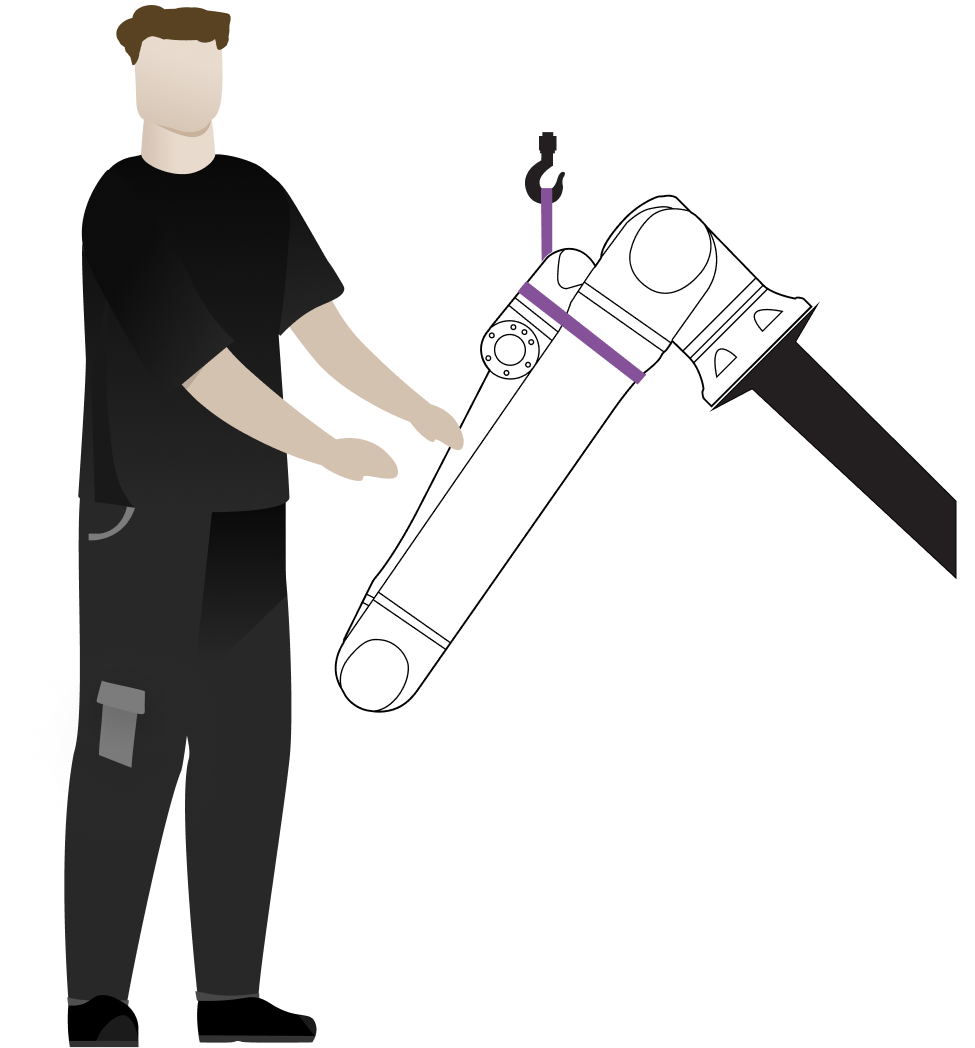
Robot kol yanlamasına, baş aşağı veya bir açıyla (±45°) monte edilebilir.
|
|
|
|
Ağır parçaların kaldırılması veya taşınması yaralanmalara neden olabilir.
Bileşenlerin ve/veya kablo tesisatının yanlış montajı yaralanmalara yol açabilir.
|
|
|
Bölgenizde montaj sırasında kaldırma için özel düzenlemeler olabilir.
Ayrıntılı montaj açıklamaları için Montaj bölümüne bakın.
|