Temel Program Düğümleri: Taşı
| Açıklama |
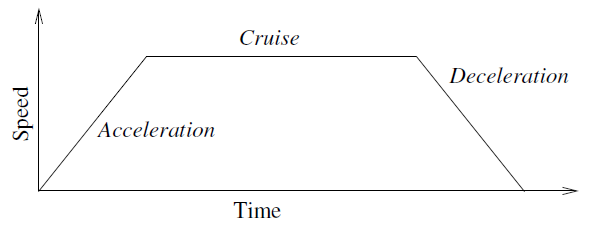
Hareket Et komutu, robotun A noktasından B noktasına hareket etmesini sağlar. Robotun nasıl hareket ettiği, robotun gerçekleştirdiği görev için önemlidir. Program ağacınıza bir Hareket eklediğinizde, ekranın sağ tarafında Hareket bölmesi belirir. Hareket Et bölmesindeki seçenekler, bir Hareket Et ve ekli geçiş noktasını yapılandırmanıza olanak tanır.
|
| Hız ayarları |
Hareket türleri için geçerli olan paylaşılan parametreler maksimum eklem hızı ve eklem ivmesidir.
|
|
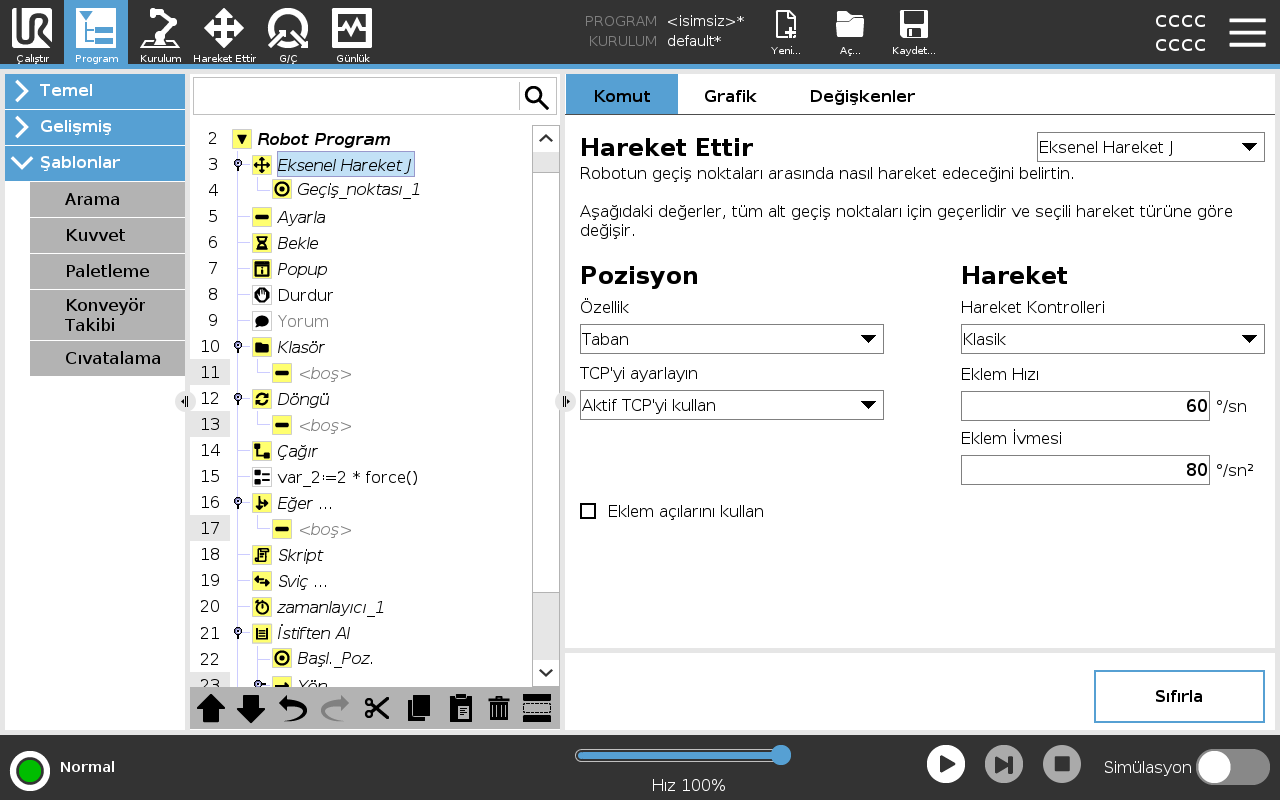
Eklem açılarını kullan seçeneği, bir geçiş noktası tanımlamak için HareketJ kullanırken 3B poza bir alternatiftir.
Eklem açısını kullan özelliği kullanılarak tanımlanan geçiş noktaları, bir program robotlar arasında taşındığında değiştirilmez. Bu, programınızı yeni bir robota yüklüyorsanız kullanışlıdır.
Eklem açılarını kullan seçeneğinin kullanılması, TCP seçeneklerini ve özelliği kullanılamaz hâle getirir. |
|
Robot programı yürütmesi sırasında TCP'yi değiştirmeniz gerekiyorsa bu ayarı kullanın. Robot programında farklı nesneleri manipüle etmeniz gerekiyorsa bu kullanışlıdır. Robotun hareket şekli, hangi TCP'nin aktif TCP olarak ayarlandığına bağlı olarak ayarlanır. Aktif TCP'yi Yoksay , bu hareketin Takım Flanşına göre ayarlanmasını sağlar. |
|
| Bir Harekette TCP belirlemek için |
|
|
Programın uç ekipman koordinatlarını hatırlaması için ara noktalar arasında Özelliği kullanabilirsiniz. Bu, geçiş noktalarını ayarlarken yararlıdır (bakın: Özellikler).
Şekli aşağıdaki durumlarda kullanabilirsiniz:
|