Pallprocess
| Beskrivning |
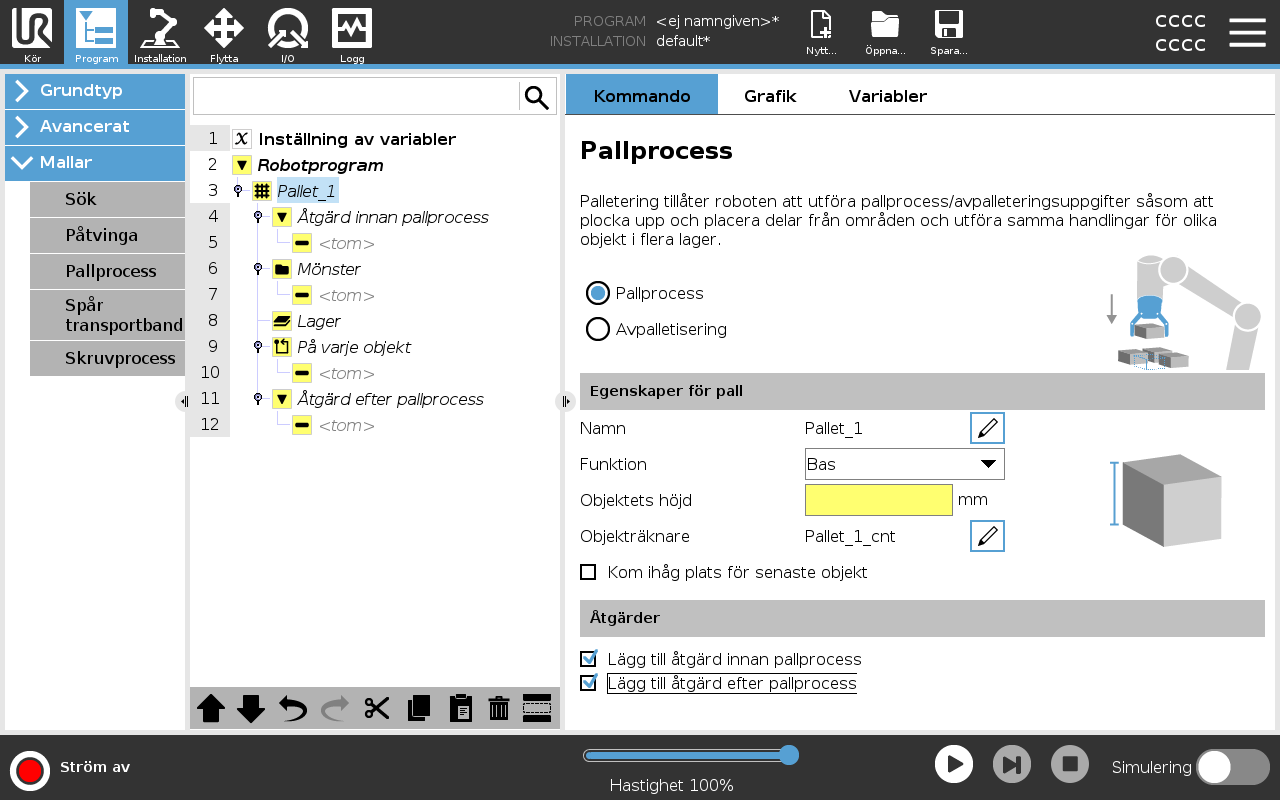
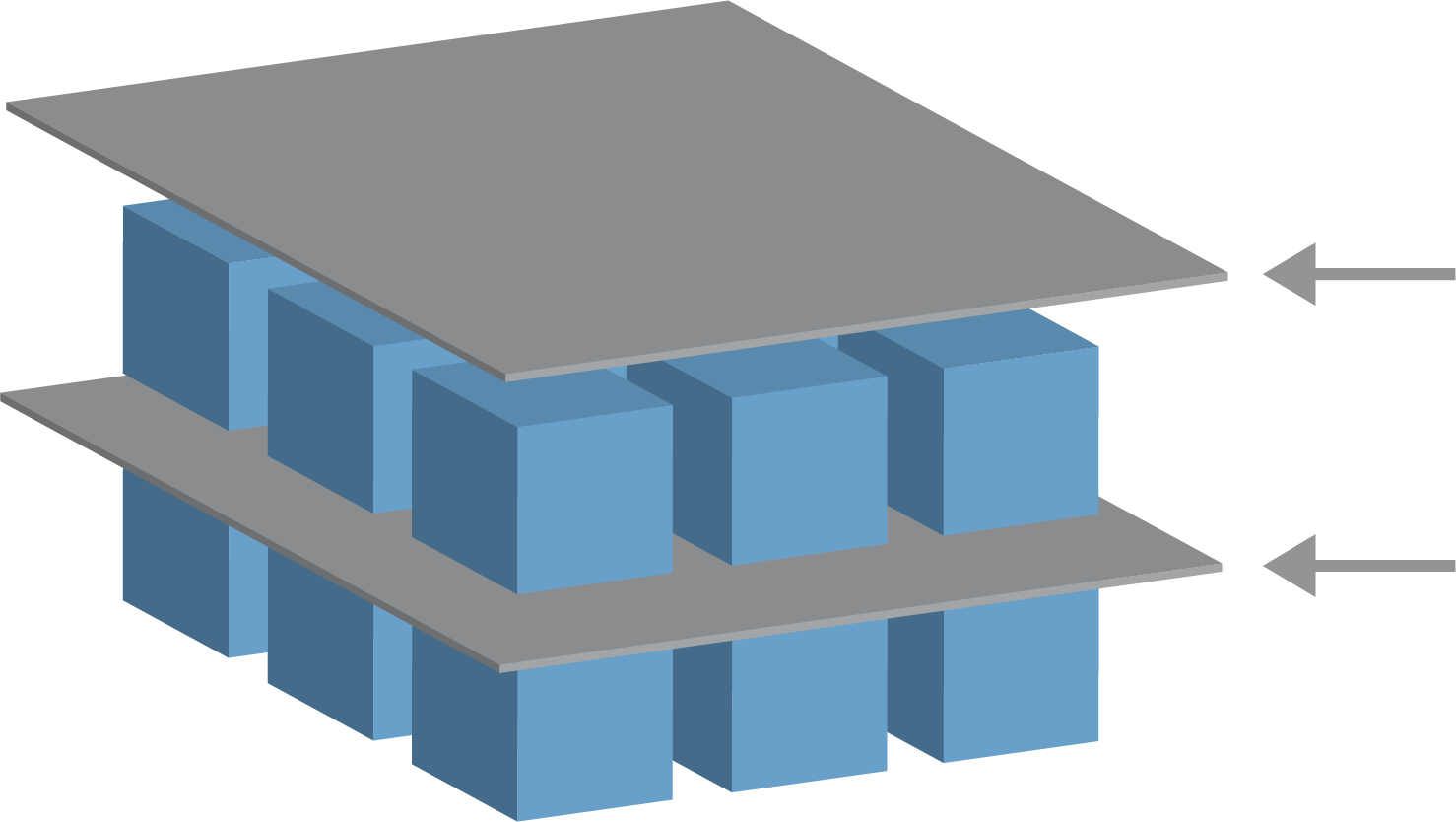
Palletering är en mall för enkel programmering av palletering och avpalletering, plockning och placering av delar (från tråg, fixturer osv.) och för att låta roboten utföra repeterbara uppgifter för olika artiklar i flera olika lager med olika mönster. Du kan skapa olika mönster och applicera dem på specifika lager. Du kan också placera en separator mellan varje lager (se ). Du kan även använda funktioner från Pallegenskaper för att justera pallens placering. Om du vill läsa mer om funktioner, se Följ avsnittet Skapa ett palleteringsprogram nedan om du vill använda palleteringsmallen.
|
| Skapa ett palleteringsprogram |
|
| Skapa ett palleteringsprogram |
|
| Vid varje artikel-guide |
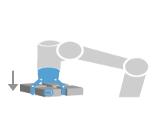
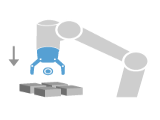
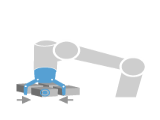
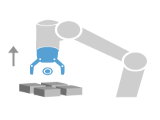
Vid varje artikel-guiden hjälper dig att definiera de åtgärder som ska utföras för varje artikel på en pall, till exempel referenspunkt, verktygsåtgärdspunkt samt vägpunkter för inkörning och utkörning (beskrivs i tabellen nedan). Vägpunkter för in- och utkörning för varje objekt står kvar i samma orientering och riktning oavsett de olika objektens orientering.
|
| Menuell konfiguration |
|
| (A) Separatorguide |
|
| (B) Manuell konfigurering |
|
| Alternativ till Anpassa ett palleteringsprogram |
Du kan specialanpassa ditt palleteringsprogram på följande sätt:
|
| Positioner |
|



| Åtgärder |
|