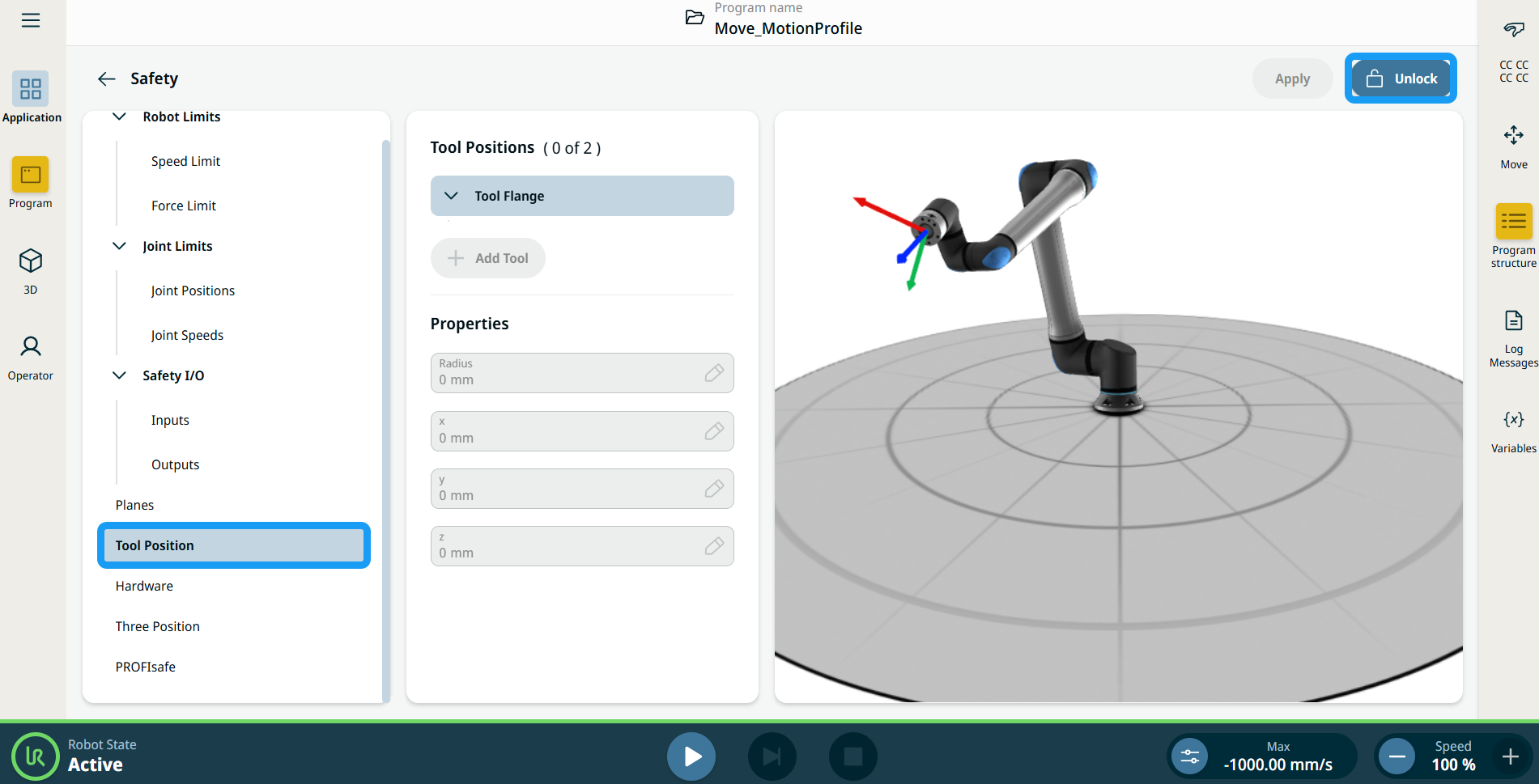
Begränsning av verktygsposition
| Detaljer |
Verktygsposition har två viktiga fördelar:
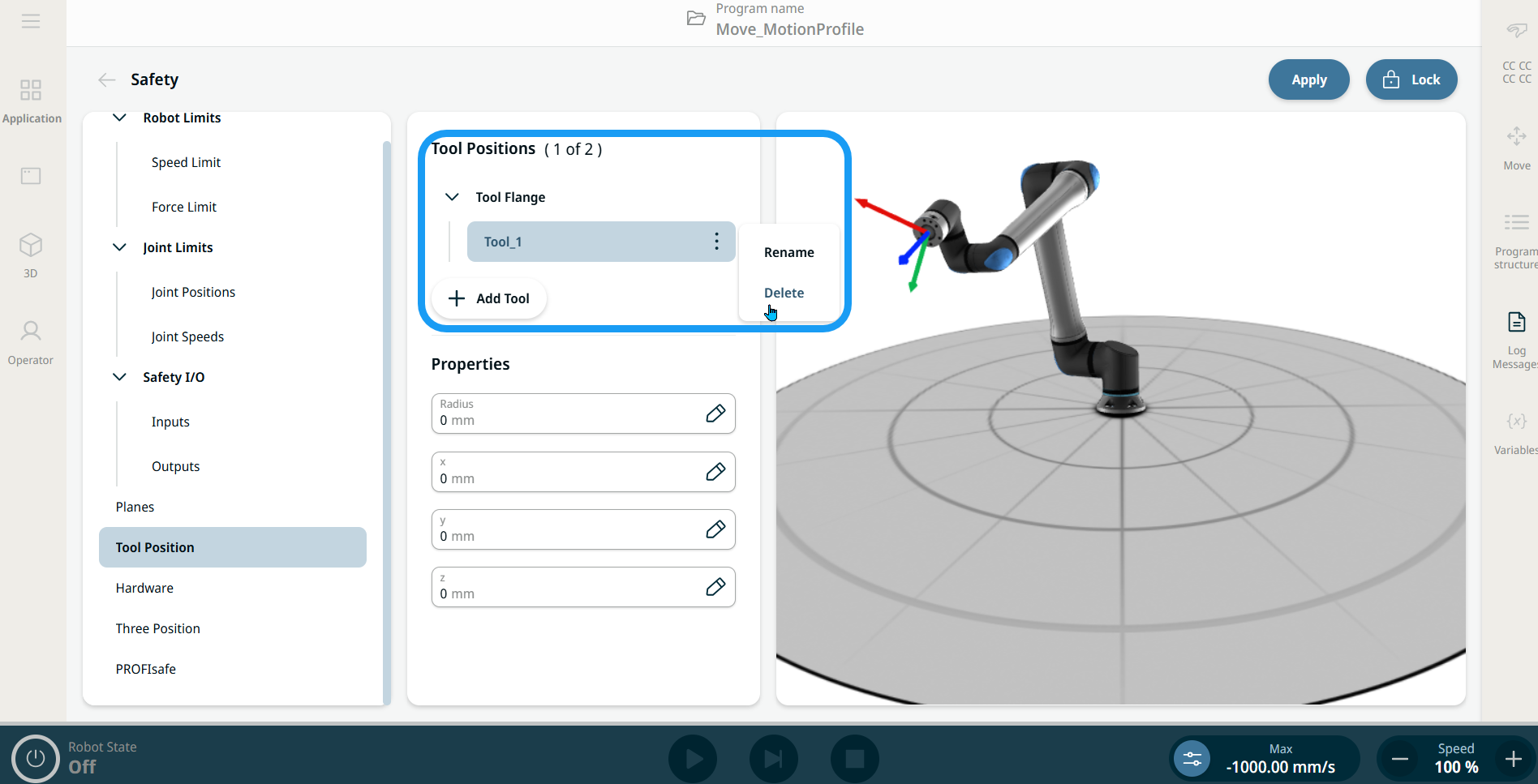
Du kan definiera, konfigurera och hantera upp till två verktygspositioner.
|
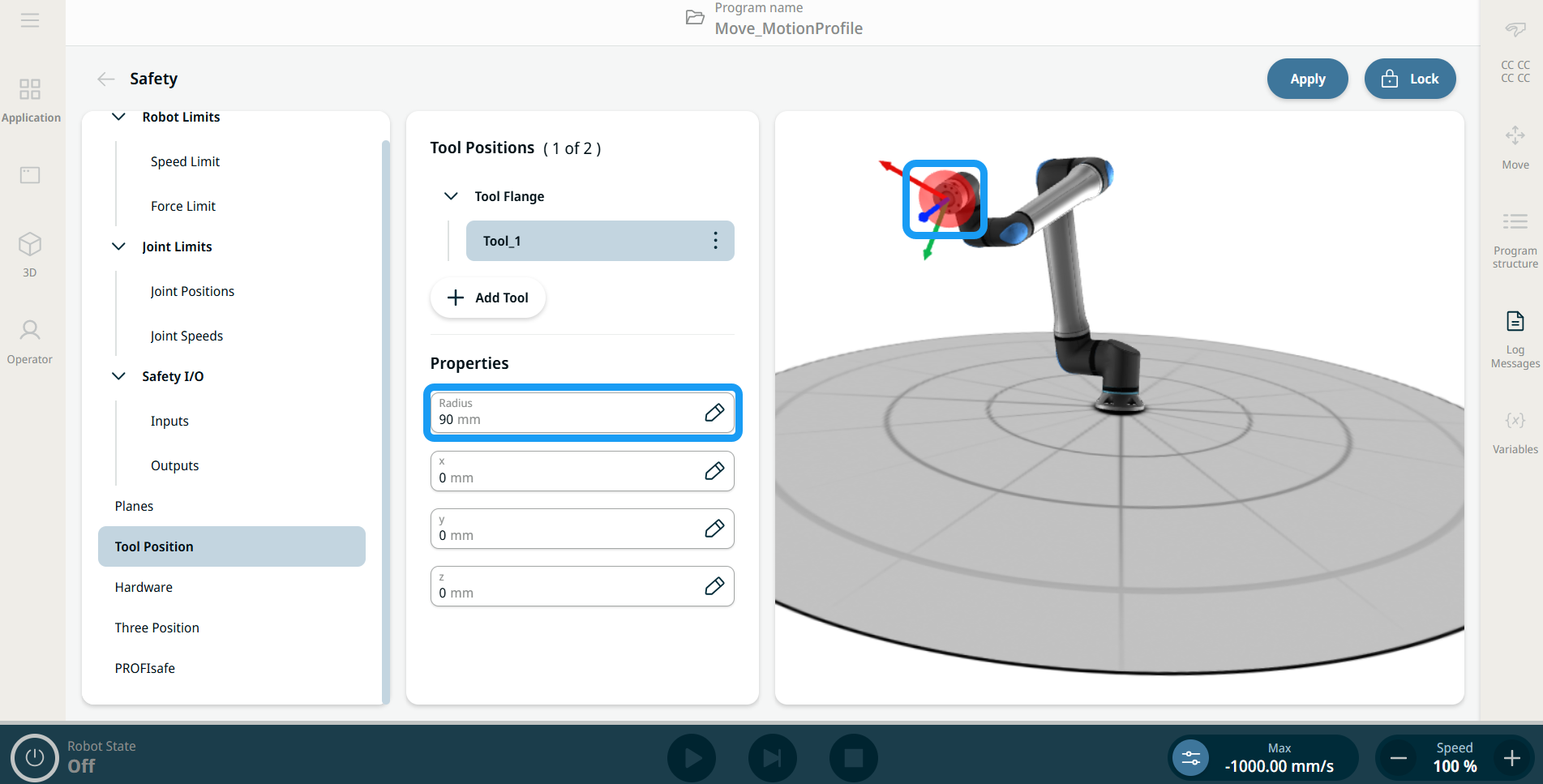
| Användardefinierade verktyg |
För de användardefinierade verktygen kan användaren ändra:
|
|
För att komma åt verktygsposition |
|
|
|
|
|
|
|