Tryggt hem
| Beskrivning |
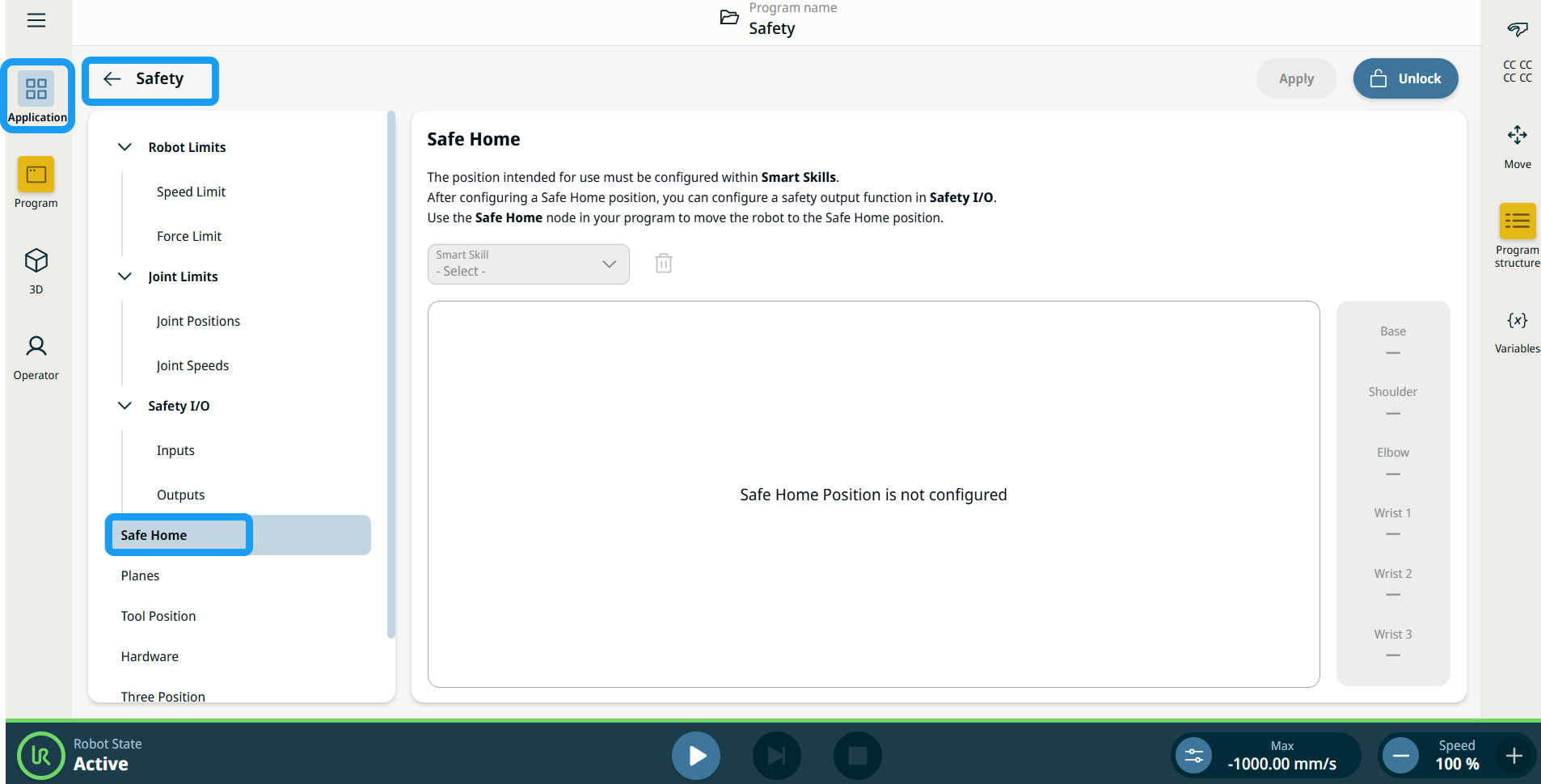
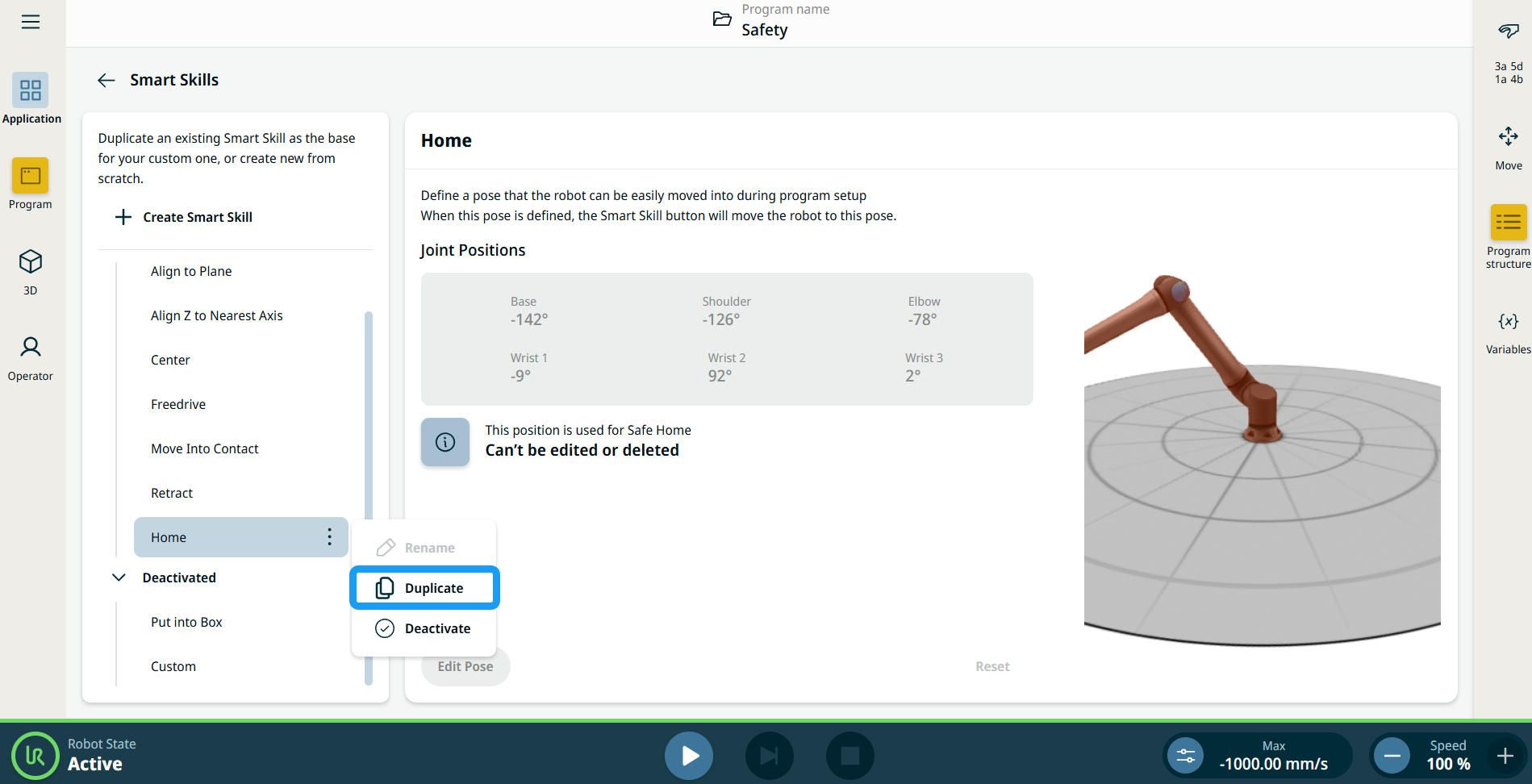
Säkert hem är en funktion i PolyScope X som gör det möjligt för användare att definiera en säkerhetsrelaterad utgång som aktiveras när roboten når den konfigurerade säkra hempositionen. Användaren väljer Hem i rullgardinsmenyn med tillgängliga smarta färdighetspositioner, som kan tilldelas som referens för positionen Säker hem.
|
|
Åtkomst till Säker hem |
|
|
|
|
|
|
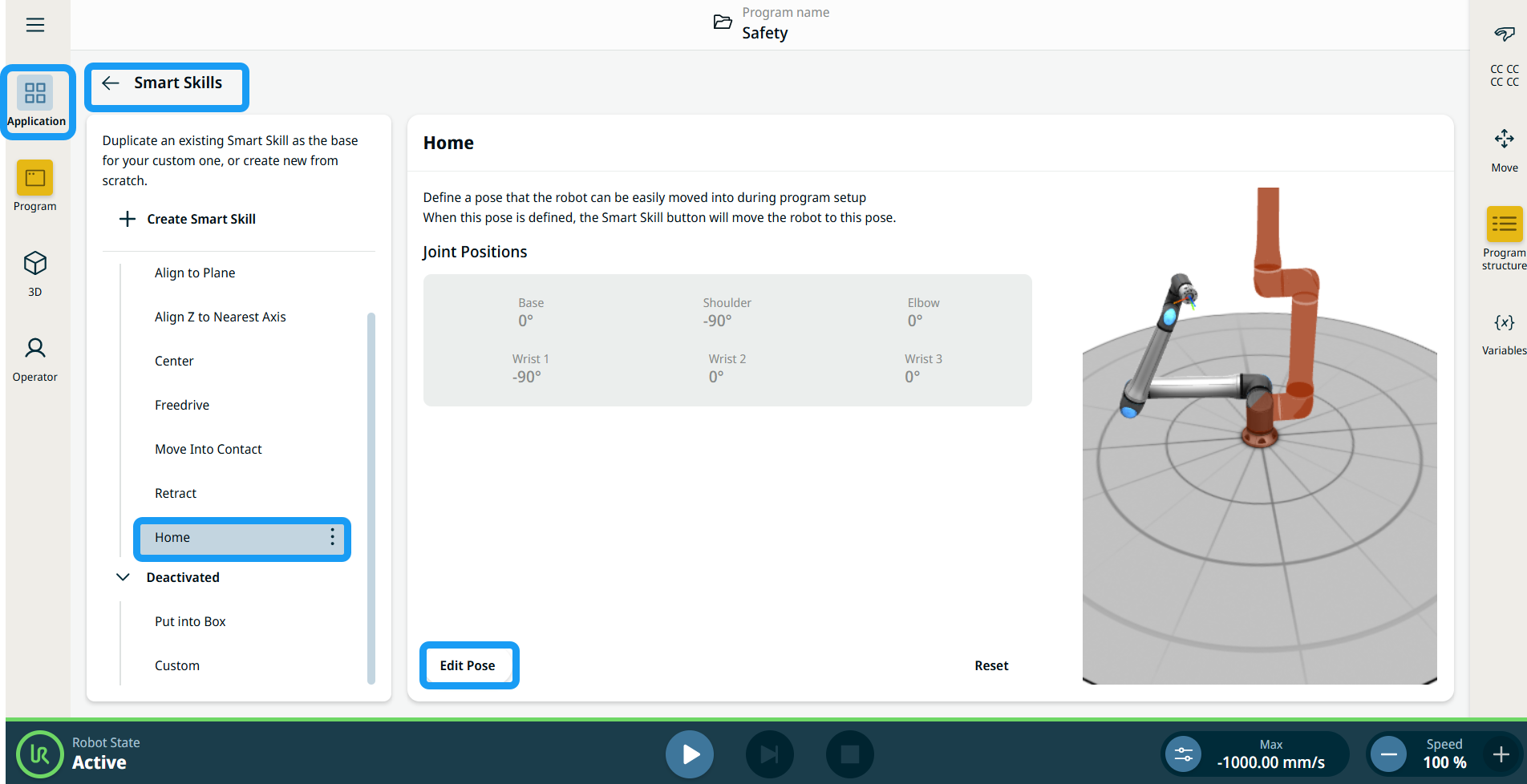
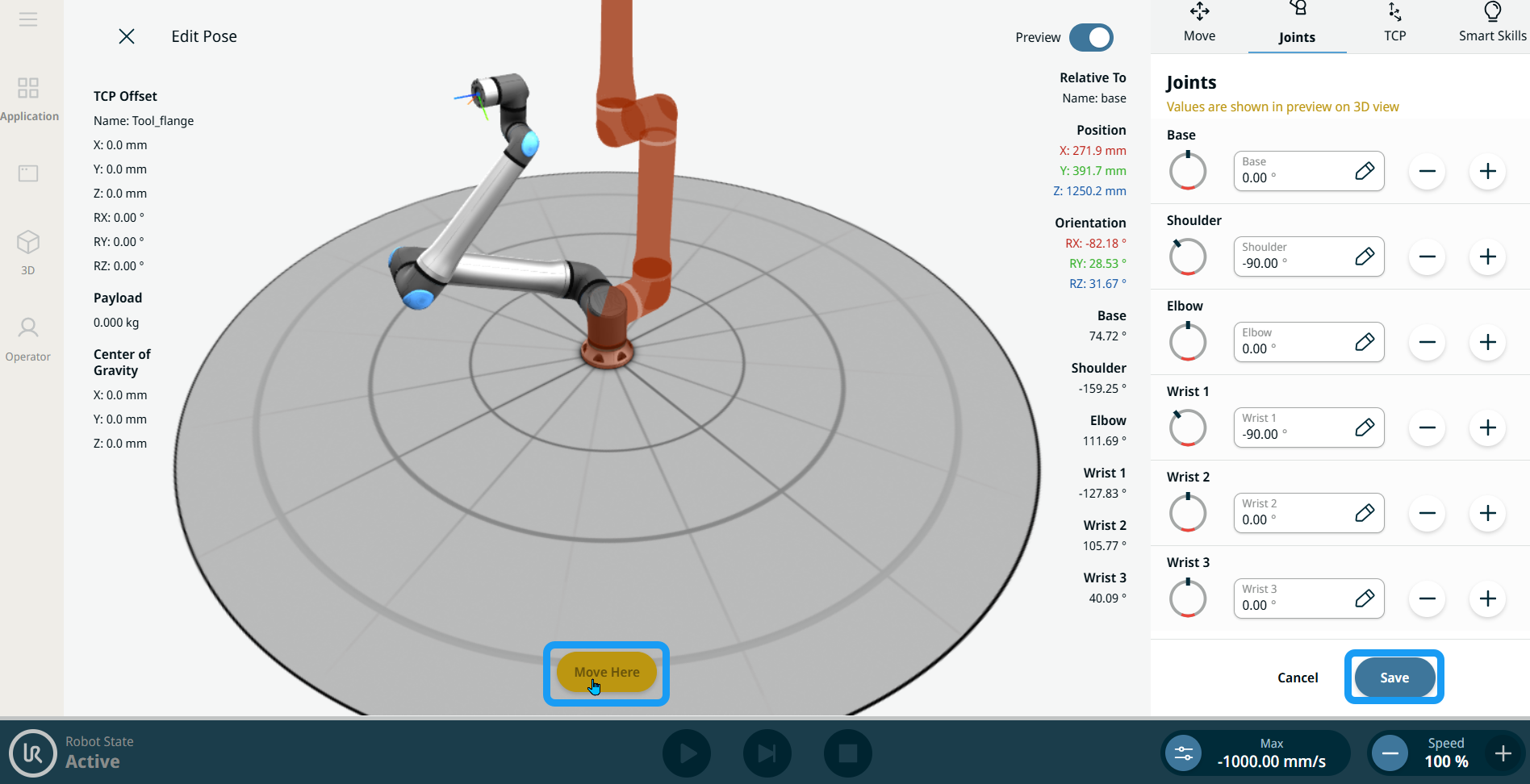
Om Position Smart Skill väljs som positionsreferens för Safe Home:
|
|
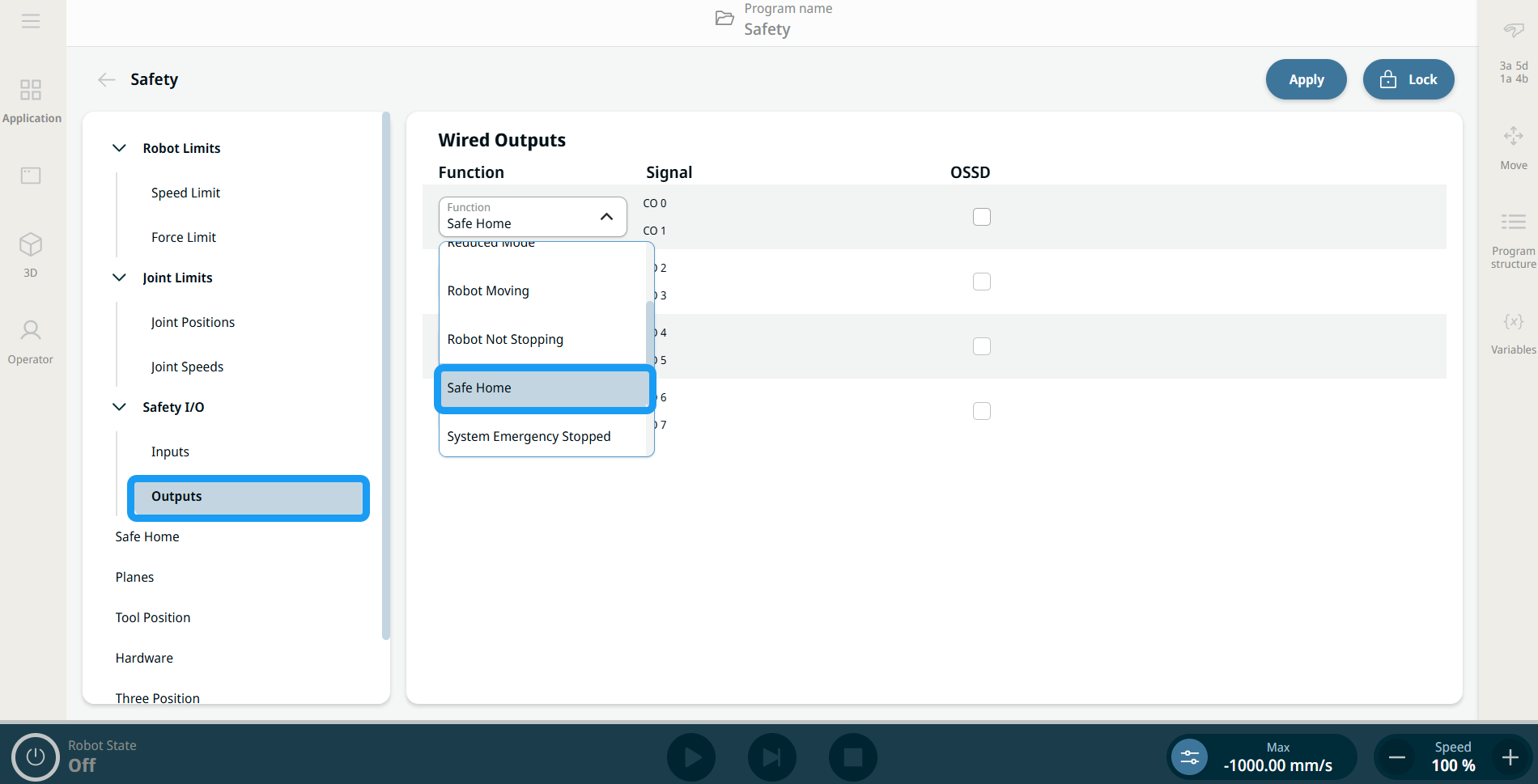
Säker hem-funktion i utgångar |
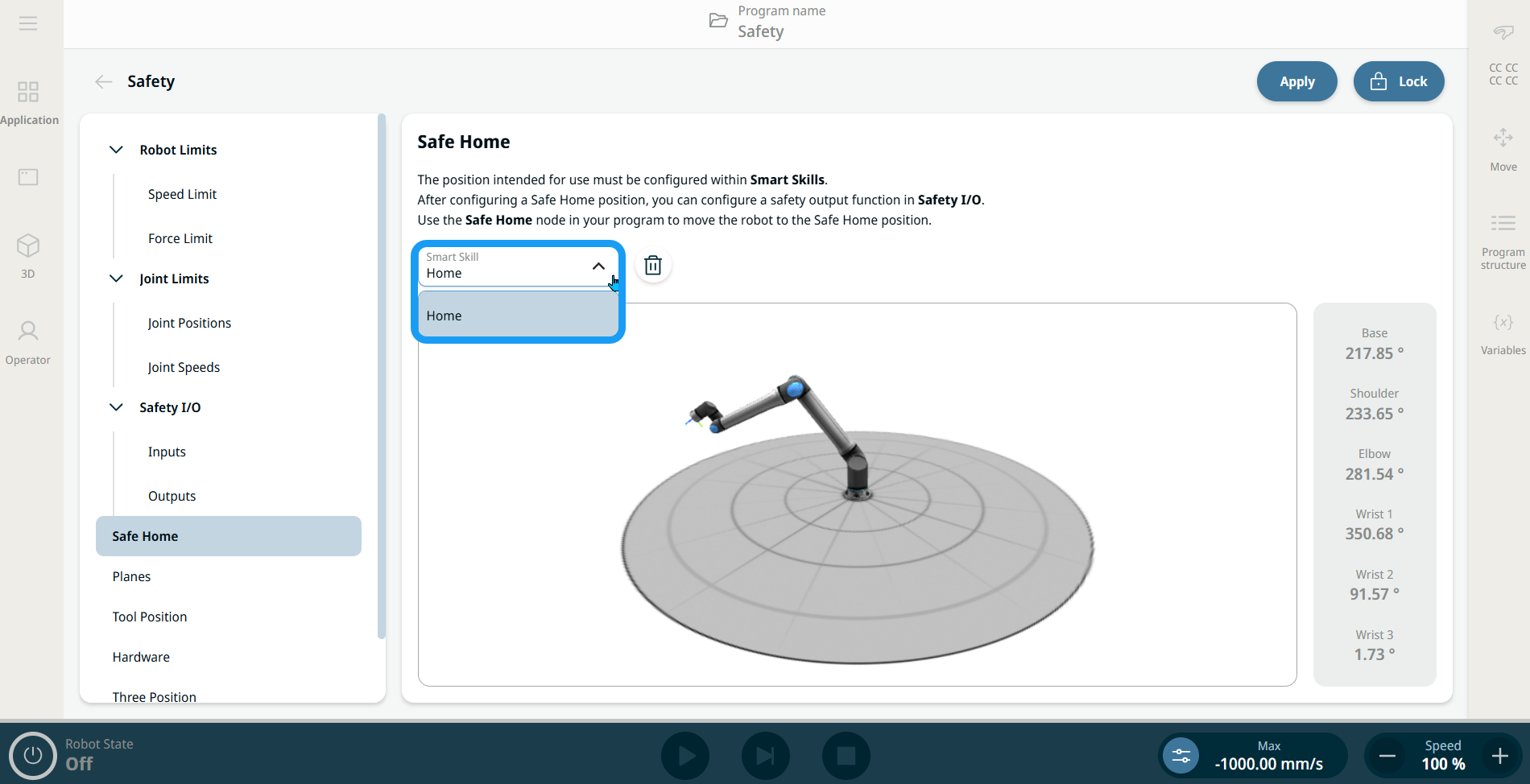
Om positionen Hem tilldelas en smart skill-positions i Säkerhet, innehåller rullgardinsmenyn för säkerhetsutgångsfunktionen Säker hem som en ny funktionstilldelning. Välj Säker hem i fälten Funktion i Utgångar för Säkerhets-I/O.
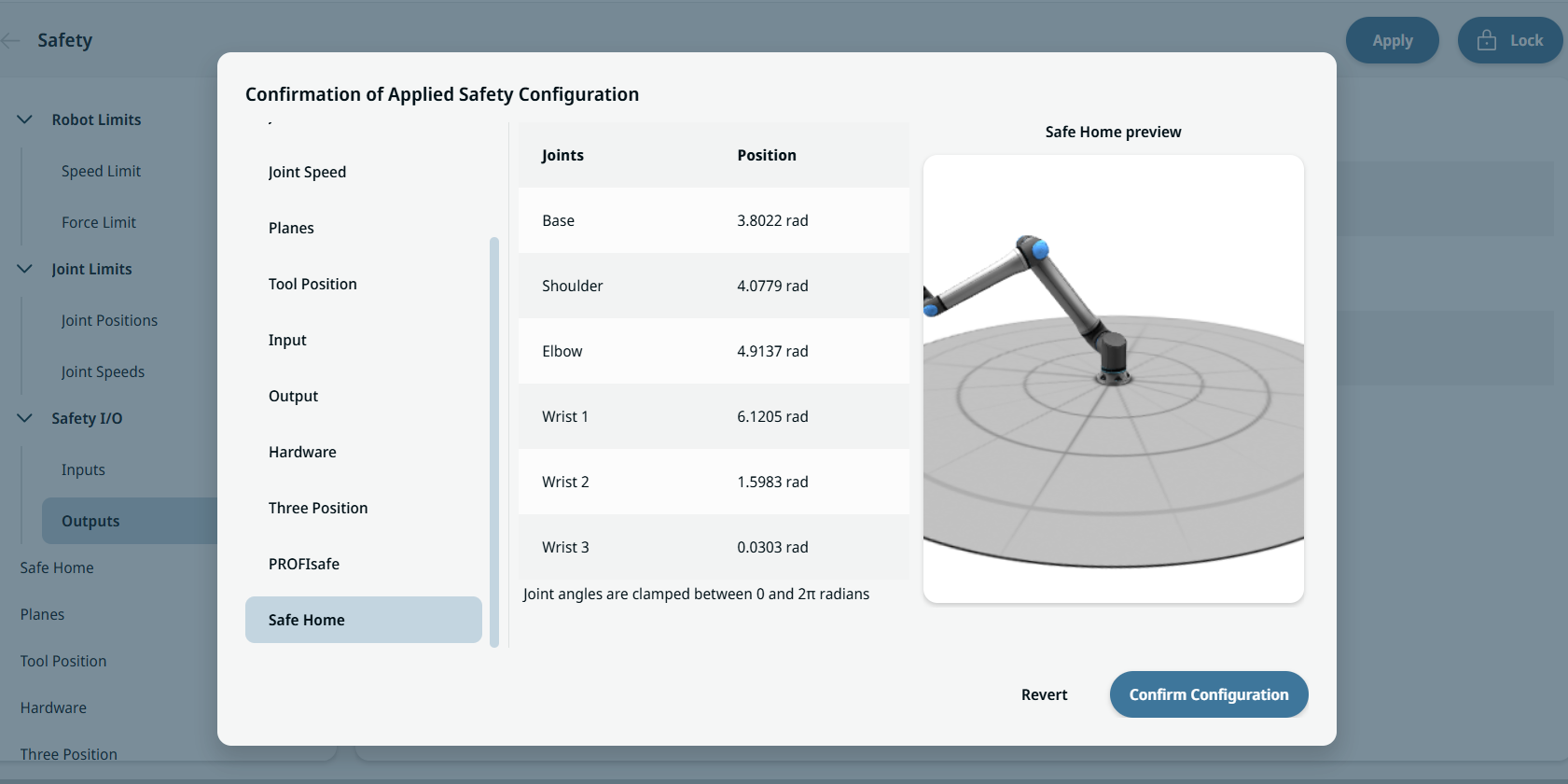
Säker hem kan ses i tabellen över funktions tilldelning i översiktsdialogrutan Bekräftelse av tillämpad säkerhetskonfiguration.
|
|
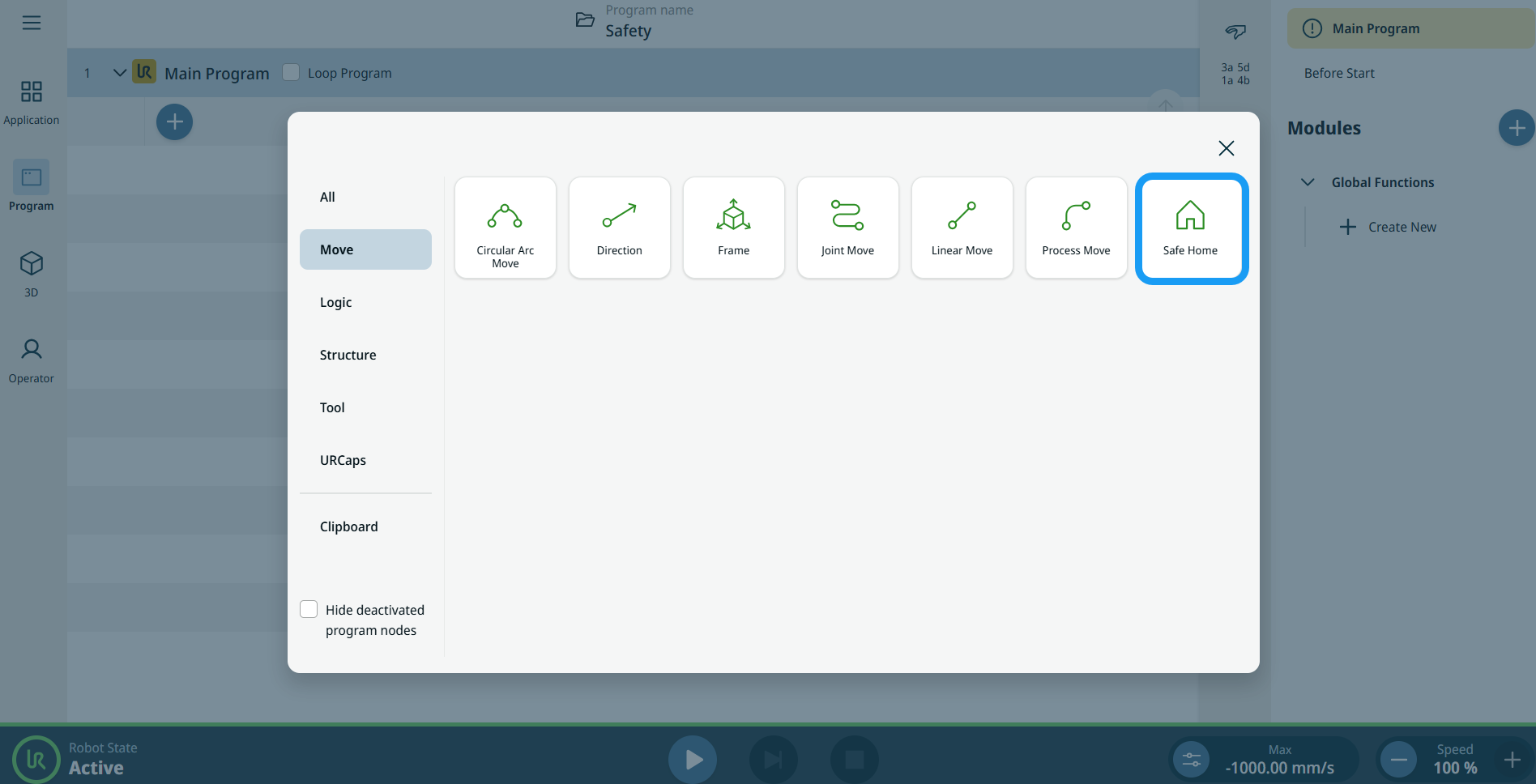
Säker hem som programnod |
Programnoden Säker hem finns under kategorin Flytta noder i Kommandonoder. Denna nod används för att beordra roboten att flytta till sin fördefinierade säker hem-position, enligt konfigurationen i säkerhetsapplikationens inställningar för säker hem.
Om du lägger till noden utan att ha konfigurerat en säker hem-position i säkerhetsinställningarna markeras noden med gult.

Kommandonoden Säker hem har alternativ för rörelseprofiler och andra avancerade inställningar när du trycker på ellipsikonen
|
 .
.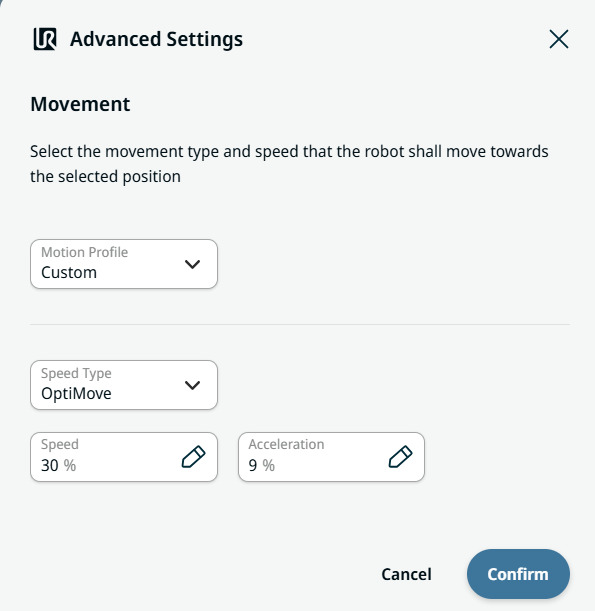
| Avancerade inställningar |
Användare kan skapa rörelseprofiler i Avancerade inställningar med hjälp av de två flikarna och de två fälten:
Rörelseprofil är en funktion som gör det möjligt för användare att ställa in fördefinierade rörelseprofiler i rörelsenoder: Gemensam rörelse, Linjär rörelse, Cirkelbågsrörelse, Processrörelse och Riktning. Anpassad rörelseprofil gör det möjligt för användare att definiera rörelsedata i rörelsenoden. I fältet Hastighetstyp är OptiMove standardalternativet. Välj Classic rörelse om du vill ange hastighet och acceleration i grader per sekund eller mm per sekund. OptiMove-inställningarna anges i procent för att förenkla användningen och konfigurationen. Användare kan konfigurera procentandelen för önskad hastighet i fliken Hastighet, som ställer in målhastigheten som en procentandel av robotens maximala hastighet. Användare kan konfigurera procentandelen för önskad acceleration i fliken Acceleration, som ställer in målvärdena för vridmomentet under acceleration och retardation som en procentandel av robotens maximala effekt.
|